Speed Detection 5.0
Note
🌟 Welcome to the SunFounder Facebook Community! Whether you’re into Raspberry Pi, Arduino, or ESP32, you’ll find inspiration, help ideas here.
✅ Be the first to get free learning resources.
✅ Stay updated on new products & exclusive giveaways.
✅ Share your creations and get real feedback.
Kit purchase
Looking for parts? Check out our all-in-one kits below — packed with components, beginner-friendly guides, and tons of fun.

Name |
Includes Arduino board |
PURCHASE LINK |
|---|---|---|
Elite Explorer Kit |
Arduino Uno R4 WiFi |
|
3 in 1 Ultimate Starter Kit |
Arduino Uno R4 Minima |
Course Introduction
This Arduino project detects speed using IR sensor and Ultrasonic Sensor Module. When an object passes the first sensor, a timer starts; it stops at the second sensor.
Note
If this is your first time working with an Arduino project, we recommend downloading and reviewing the basic materials first.
Required Components
In this project, we need the following components:
SN |
COMPONENT INTRODUCTION |
QUANTITY |
PURCHASE LINK |
|---|---|---|---|
1 |
Arduino UNO R4 Minima |
1 |
|
2 |
USB Type-C cable |
1 |
|
3 |
Breadboard |
1 |
|
4 |
Wires |
Several |
|
5 |
Ultrasonic Sensor Module |
1 |
|
6 |
IR Obstacle Avoidance Sensor Module |
1 |
|
7 |
I2C LCD 1602 |
1 |
|
8 |
Buzzer Modudle |
1 |
Wiring
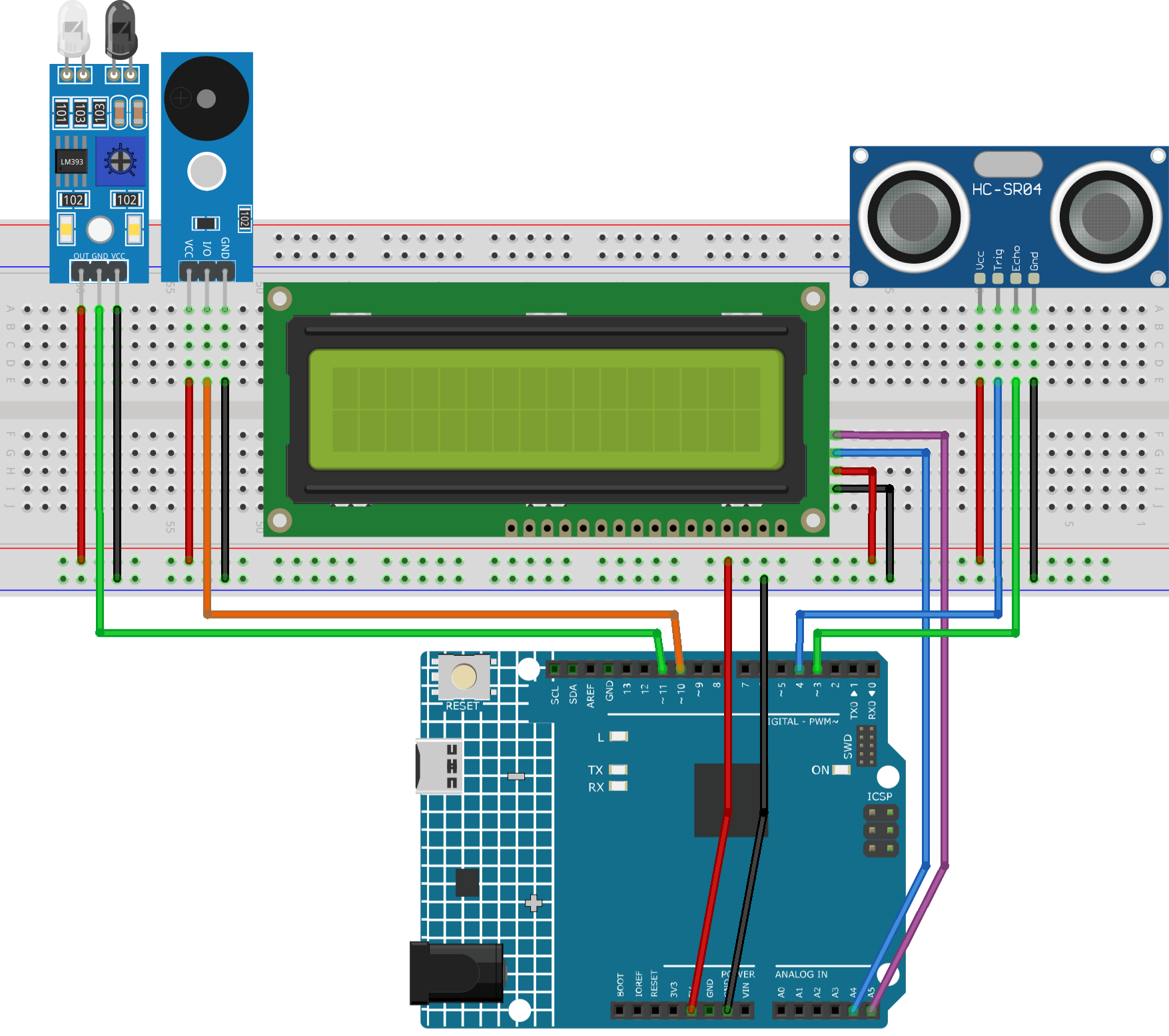
Common Connections:
I2C LCD 1602
SDA: Connect to A4 on the Arduino.
SCL: Connect to A5 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Ultrasonic Sensor Module
Trig: Connect to 4 on the Arduino.
Echo: Connect to 3 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
IR Obstacle Avoidance Sensor Module
OUT: Connect to 11 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Buzzer Module
I/0: Connect to 10 on the Arduino.
+: Connect to breadboard’s red power bus.
-: Connect to breadboard’s negative power bus.
Writing the Code
Note
You can copy this code into Arduino IDE.
To install the library, use the Arduino Library Manager and search for LiquidCrystal I2C and install it.
Don’t forget to select the board(Arduino UNO R4 Minima/WIFI) and the correct port before clicking the Upload button.
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// LCD address is usually 0x27 for a 16x2 I2C LCD.
LiquidCrystal_I2C lcd(0x27, 16, 2);
// Ultrasonic sensor pins
#define TRIG1 4
#define ECHO1 3
// Obstacle sensor OUT pin connects to D11.
#define OBSTACLE_PIN 11
// Buzzer connects to D10.
#define BUZZER_PIN 10
// Distance between the ultrasonic sensor and obstacle sensor, in meters.
float gateDistance = 1.30;
// Speed <= 30 km/h shows "Normal"; speed > 30 km/h shows "Over Speed!".
float speedLimit = 30.0;
// The ultrasonic sensor triggers when an object is closer than this distance.
float triggerDist = 15.0;
// These variables store the current detection state.
bool firstGateTriggered = false;
bool speedCalculated = false;
// t1: time when the ultrasonic sensor is triggered.
// t2: time when the obstacle sensor is triggered.
unsigned long t1 = 0;
unsigned long t2 = 0;
// Measure distance with the ultrasonic sensor and return the value in cm.
float getDistanceCM(int trigPin, int echoPin) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// pulseIn measures how long the echo pin stays HIGH.
long duration = pulseIn(echoPin, HIGH, 30000);
// If no echo is received, return -1 as invalid data.
if (duration == 0) {
return -1;
}
// Convert echo time to distance.
// 0.034 cm/us is the approximate speed of sound.
return duration * 0.034 / 2;
}
// Reset the system and show the waiting screen.
void resetSystem() {
firstGateTriggered = false;
speedCalculated = false;
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Speed Detector");
lcd.setCursor(0, 1);
lcd.print("Waiting...");
}
// One short beep means the result is normal.
void shortBeep() {
tone(BUZZER_PIN, 1500);
delay(120);
noTone(BUZZER_PIN);
}
// Beep 4 times when the speed is over the limit.
void overSpeedAlert() {
for (int i = 0; i < 4; i++) {
tone(BUZZER_PIN, 2000);
delay(200);
noTone(BUZZER_PIN);
delay(200);
}
}
void setup() {
pinMode(TRIG1, OUTPUT);
pinMode(ECHO1, INPUT);
// Most obstacle sensors use OUT to output HIGH or LOW.
pinMode(OBSTACLE_PIN, INPUT);
pinMode(BUZZER_PIN, OUTPUT);
// Use Serial Monitor to check sensor values during testing.
Serial.begin(9600);
lcd.init();
lcd.backlight();
resetSystem();
}
void loop() {
// Read the ultrasonic distance.
float d1 = getDistanceCM(TRIG1, ECHO1);
// Most obstacle modules output LOW when an object is detected.
int obstacleState = digitalRead(OBSTACLE_PIN);
// Print sensor values for debugging.
Serial.print("Distance: ");
Serial.print(d1);
Serial.print(" cm | Obstacle: ");
Serial.println(obstacleState);
// The ultrasonic sensor is the first detection point.
if (!firstGateTriggered && d1 > 0 && d1 < triggerDist) {
firstGateTriggered = true;
t1 = millis();
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Object detected");
lcd.setCursor(0, 1);
lcd.print("Measuring...");
}
// If the second sensor is not triggered within 5 seconds, reset the system.
if (firstGateTriggered && !speedCalculated && millis() - t1 > 5000) {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Timeout");
lcd.setCursor(0, 1);
lcd.print("Try again");
delay(1500);
resetSystem();
}
// The obstacle sensor is the second detection point.
if (firstGateTriggered && !speedCalculated && obstacleState == LOW) {
t2 = millis();
speedCalculated = true;
// Convert the time difference from milliseconds to seconds.
float deltaT = (t2 - t1) / 1000.0;
lcd.clear();
// Ignore very small time differences to avoid false triggers.
if (deltaT > 0.05) {
// Speed = distance / time, then convert m/s to km/h.
float speed = (gateDistance / deltaT) * 3.6;
lcd.setCursor(0, 0);
lcd.print("Speed:");
lcd.print(speed, 1);
lcd.print("km/h");
lcd.setCursor(0, 1);
if (speed > speedLimit) {
lcd.print("Over Speed!");
overSpeedAlert();
} else {
lcd.print("Normal");
shortBeep();
}
Serial.print("Speed: ");
Serial.print(speed);
Serial.println(" km/h");
} else {
lcd.setCursor(0, 0);
lcd.print("Invalid data");
}
delay(1500);
resetSystem();
}
delay(50);
}