Parking Sensor 1.0
Note
🌟 Welcome to the SunFounder Facebook Community! Whether you’re into Raspberry Pi, Arduino, or ESP32, you’ll find inspiration, help ideas here.
✅ Be the first to get free learning resources.
✅ Stay updated on new products & exclusive giveaways.
✅ Share your creations and get real feedback.
👉 Need faster updates or support? Click [here] join our Facebook community
👉 Or join our WhatsApp group: Click [here]
🎁 Looking for parts?Check out our all-in-one kits below — packed with components, beginner-friendly guides, and tons of fun.
Name |
Includes Arduino board |
PURCHASE LINK |
|---|---|---|
Elite Explorer Kit |
Arduino Uno R4 WiFi |
|
3 in 1 Ultimate Starter Kit |
Arduino Uno R4 Minima |
Course Introduction
In this lesson, we’ll build a basic parking assistance system (v1.0) using an Ultrasonic Sensor Module, MAX7219 Dot Matrix Module, and a passive buzzer Module with Arduino board.
As an obstacle approaches the ultrasonic sensor, the buzzer will emit warning sounds that become increasingly rapid, while the dot matrix display will show a rough visual representation of the obstacle’s proximity.
Note
If this is your first time working with an Arduino project, we recommend downloading and reviewing the basic materials first.
Required Components
In this project, we need the following components:
SN |
COMPONENT INTRODUCTION |
QUANTITY |
PURCHASE LINK |
|---|---|---|---|
1 |
Arduino UNO R4 Minima/Arduino UNO R4 WIFI |
1 |
|
2 |
USB Type-C cable |
1 |
|
3 |
Breadboard |
1 |
|
4 |
Wires |
Several |
|
5 |
Ultrasonic Sensor Module |
1 |
|
6 |
MAX7219 Dot Matrix Module |
1 |
|
7 |
Alarm Sound Module |
1 |
Wiring
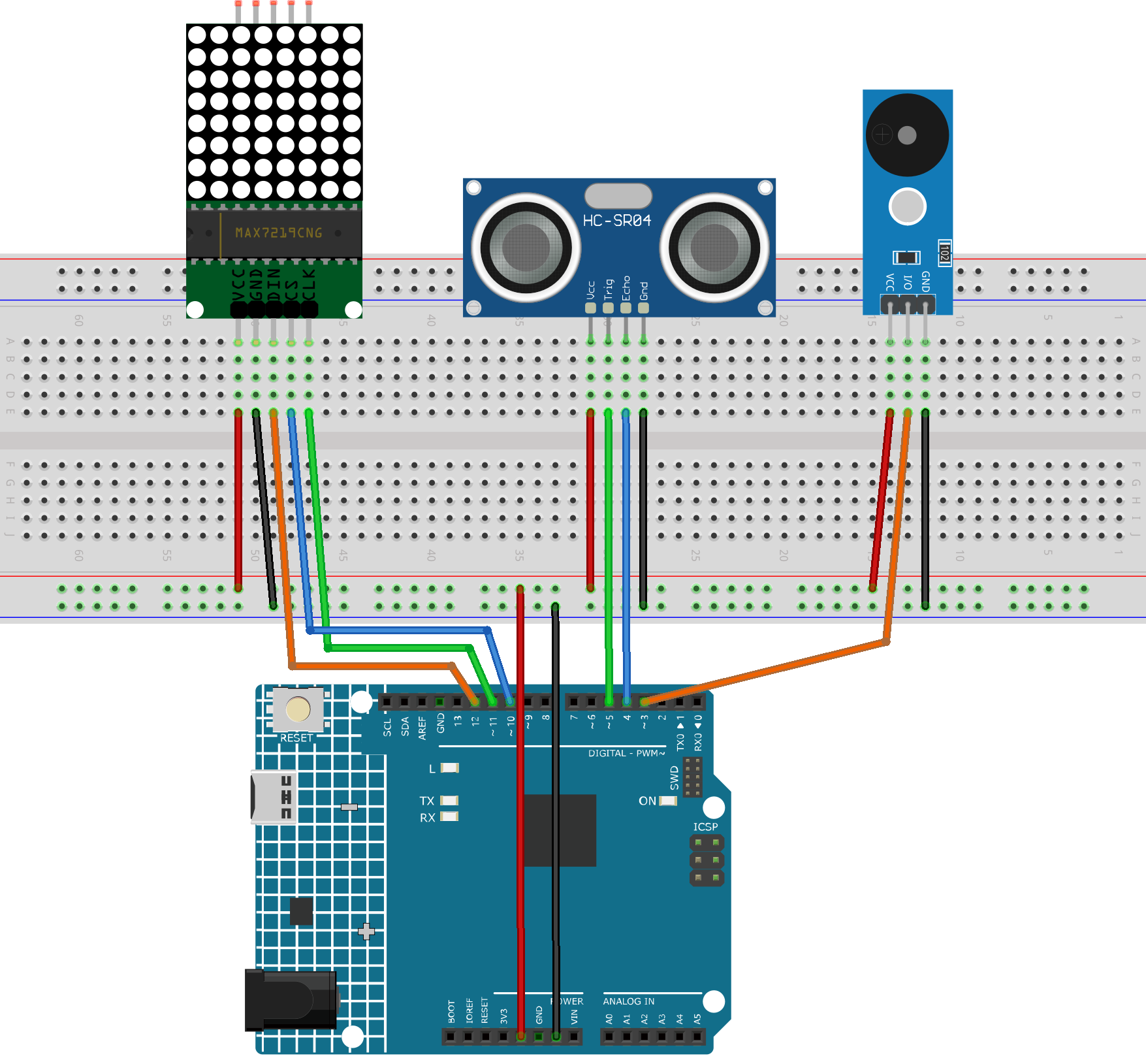
Common Connections:
Passive Buzzer Module
VCC: Connect to breadboard’s red power bus.
I/O: Connect to 3 on the Arduino.
GND: Connect to breadboard’s negative power bus.
MAX7219 Dot Matrix Module
CLK: Connect to 11 on the Arduino.
CS: Connect to 10 on the Arduino.
DIN: Connect to 12 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Ultrasonic Sensor Module
Trig: Connect to 5 on the Arduino.
Echo: Connect to 4 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Writing the Code
Note
You can copy this code into Arduino IDE.
To install the library, use the Arduino Library Manager and search for LedControl and install it.
Don’t forget to select the board(Arduino UNO R4 WIFI) and the correct port before clicking the Upload button.
#include <LedControl.h>
// Pin definitions
const int echoPin = 4; // Ultrasonic sensor Echo pin
const int trigPin = 5; // Ultrasonic sensor Trig pin
const int buzzerPin = 3; // Buzzer pin
// Initialize LedControl for MAX7219: DIN=12, CLK=11, CS=10, 1 device
LedControl lc = LedControl(12, 11, 10, 1);
int previousColumnsLit = 0; // Last number of lit columns
// Buzzer non-blocking control variables
unsigned long lastBeepTime = 0; // Timestamp of last beep toggle
bool isBeepOn = false; // Current buzzer state
unsigned long beepInterval = 500; // Interval for buzzer toggle in ms
void setup() {
Serial.begin(9600); // Start serial communication at 9600 baud
pinMode(echoPin, INPUT); // Set echoPin as input
pinMode(trigPin, OUTPUT); // Set trigPin as output
pinMode(buzzerPin, OUTPUT); // Set buzzerPin as output
lc.shutdown(0, false); // Wake up MAX7219
lc.setIntensity(0, 8); // Set brightness level (0-15)
lc.clearDisplay(0); // Clear the display
}
void loop() {
// 1. Read distance and update LED columns
float distance = readSensorData();
int columnsToLight = calculateColumnsToLight(distance);
displayColumnsWithTransition(previousColumnsLit, columnsToLight);
previousColumnsLit = columnsToLight;
// 2. Update beep speed based on distance, then toggle buzzer
updateBeepInterval(distance);
updateBeepState();
// 3. Print distance for debugging
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
}
// Read distance from ultrasonic sensor in centimeters
float readSensorData() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2); // Ensure clean LOW pulse
digitalWrite(trigPin, HIGH);
delayMicroseconds(10); // Send 10µs HIGH pulse
digitalWrite(trigPin, LOW);
float duration = pulseIn(echoPin, HIGH); // Read echo time in µs
float distance = duration / 58.0; // Convert to cm (approx.)
return distance;
}
// Map distance to number of LED matrix columns (0 to 8)
int calculateColumnsToLight(float distance) {
if (distance > 20) { // If farther than 20 cm
return 0; // No columns lit
} else {
int cols = (20 - distance) / 2; // Every 2 cm closer lights one column
return constrain(cols, 0, 8); // Limit result between 0 and 8
}
}
// Animate LED columns lighting/unlighting with small blocking delay
void displayColumnsWithTransition(int previousColumns, int currentColumns) {
if (currentColumns > previousColumns) {
// Light up new columns from left to right
for (int col = previousColumns; col < currentColumns; col++) {
for (int row = 0; row <= col; row++) {
lc.setLed(0, col, row, true); // Turn on LED at (col, row)
}
delay(50); // Small delay for animation effect
}
} else if (currentColumns < previousColumns) {
// Turn off columns from left to right
for (int col = previousColumns - 1; col >= currentColumns; col--) {
for (int row = 0; row <= col; row++) {
lc.setLed(0, col, row, false); // Turn off LED at (col, row)
}
delay(50); // Small delay for animation effect
}
}
}
// Set beep interval based on distance:
// <6 cm -> fast beep (100 ms on/off)
// <12 cm -> medium beep (300 ms on/off)
// <18 cm -> slow beep (500 ms on/off)
// >=18 cm -> no beep
void updateBeepInterval(float distance) {
if (distance < 6) {
beepInterval = 100; // Fast beep: 100 ms on, 100 ms off
} else if (distance < 12) {
beepInterval = 300; // Medium beep: 300 ms on, 300 ms off
} else if (distance < 18) {
beepInterval = 500; // Slow beep: 500 ms on, 500 ms off
} else {
beepInterval = 0; // Disable beep
noTone(buzzerPin);
isBeepOn = false;
}
}
// Toggle buzzer on/off without blocking using millis()
void updateBeepState() {
if (beepInterval == 0) {
return; // No beep needed
}
unsigned long currentMillis = millis();
if (currentMillis - lastBeepTime >= beepInterval) {
if (isBeepOn) {
noTone(buzzerPin); // Turn off buzzer
isBeepOn = false;
} else {
tone(buzzerPin, 1000); // Turn on buzzer at 1 kHz
isBeepOn = true;
}
lastBeepTime = currentMillis; // Reset timestamp
}
}