RFID Access6.0
Note
🌟 Welcome to the SunFounder Facebook Community! Whether you’re into Raspberry Pi, Arduino, or ESP32, you’ll find inspiration, help ideas here.
✅ Be the first to get free learning resources.
✅ Stay updated on new products & exclusive giveaways.
✅ Share your creations and get real feedback.
Kit purchase
Looking for parts? Check out our all-in-one kits below — packed with components, beginner-friendly guides, and tons of fun.
Name |
Includes Arduino board |
PURCHASE LINK |
|---|---|---|
Elite Explorer Kit |
Arduino Uno R4 WiFi |
|
Inventor Lab Kit |
Arduino Uno R3 |
Course Introduction
In this lesson, we’ll build a 6.0 access-control system using the MFRC522 module, a digital servo motor, buzzer module, and gas sensor module.
Note
If this is your first time working with an Arduino project, we recommend downloading and reviewing the basic materials first.
Required Components
In this project, we need the following components:
SN |
COMPONENT INTRODUCTION |
QUANTITY |
PURCHASE LINK |
|---|---|---|---|
1 |
Arduino UNO R4 Minima/Arduino UNO R4 WIFI |
1 |
|
2 |
USB Type-C cable |
1 |
|
3 |
Breadboard |
1 |
|
4 |
Wires |
Several |
|
5 |
MQ-2 Gas Sensor Module |
1 |
|
6 |
Buzzer Modudle |
1 |
|
7 |
MFRC522 Module |
1 |
|
8 |
Power Supply Module |
1 |
|
9 |
Digital Servo Motor |
1 |
|
10 |
I2C LCD 1602 |
1 |
Wiring
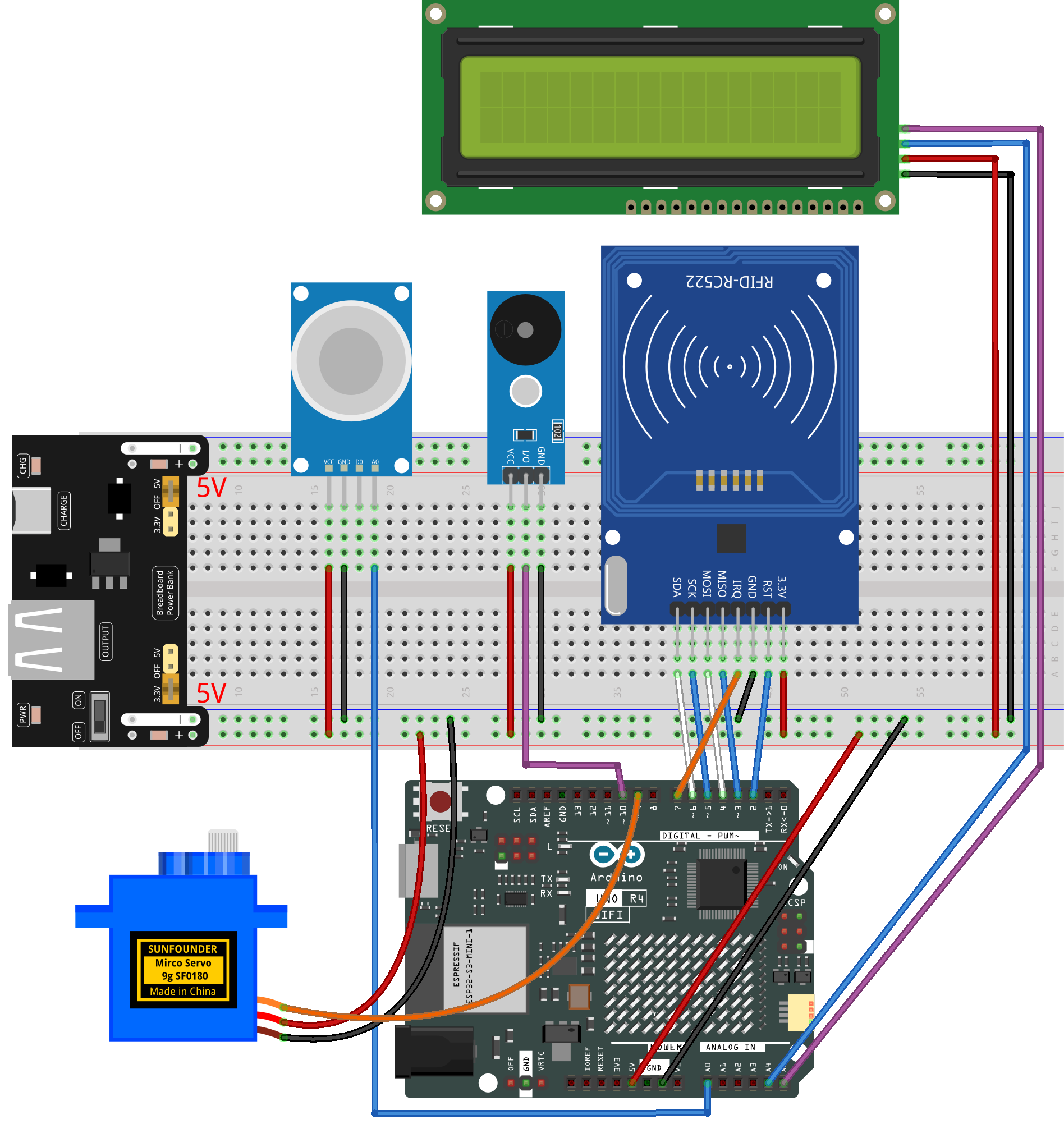
Common Connections:
MFRC522 Module
IRQ: Connect to 7 on the Arduino.
SDA: Connect to 6 on the Arduino.
SCK: Connect to 5 on the Arduino.
MOSI: Connect to 4 on the Arduino.
MISO: Connect to 3 on the Arduino.
GND: Connect to breadboard’s negative power bus.
RST: Connect to 2 on the Arduino.
3.3V: Connect to breadboard’s passive power bus.
MQ-2 Gas Sensor Module
A0: Connect to A0 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Buzzer Module
I/0: Connect to 10 on the Arduino.
+: Connect to breadboard’s red power bus.
-: Connect to breadboard’s negative power bus.
Digital Servo Motor
Connect to breadboard’s positive power bus.
Connect to breadboard’s negative power bus.
Connect to 9 on the Arduino.
I2C LCD 1602
SDA: Connect to A4 on the Arduino.
SCL: Connect to A5 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Writing the Code
Note
You can copy this code into Arduino IDE.
The
RFID1library is used here. You can click hereRFID1.zipto download it.Don’t forget to select the board(Arduino UNO R4 WIFI) and the correct port before clicking the Upload button.
#include <rfid1.h>
#include <Servo.h>
#include <LiquidCrystal_I2C.h>
#define ID_LEN 4 // Length of the RFID UID (4 bytes)
RFID1 rfid;
Servo myServo;
LiquidCrystal_I2C lcd(0x27, 16, 2); // Change 0x27 → 0x3F if screen is blank
// ==== Pin Setup ====
const int servoPin = 9; // Servo signal pin
const int buzzerPin = 10; // Passive buzzer pin
const int smokePin = A0; // Analog input from the smoke sensor
// ==== Authorized RFID Card UID (change to your own card) ====
uchar userId[ID_LEN] = {0x33, 0xF8, 0xB8, 0x1A};
uchar userIdRead[ID_LEN]; // Temporary buffer to store scanned UID
// ==== System State Flags ====
bool cardAction = false; // True while the door is opening/closing after valid card
unsigned long cardTimer = 0; // Timer for keeping the door open
bool smokeAlert = false; // True when smoke level > threshold
bool smokeRecovering = false; // True when smoke just dropped below threshold, buffer period
unsigned long smokeRecoverStart = 0; // Timer for smoke recovery delay
int smokeValue = 0; // Current sensor reading
const int smokeThreshold = 200; // Smoke alarm trigger threshold
// ==== Servo Control Values ====
int targetPos = 0; // Desired servo angle (0° or 90°)
int currentPos = 0; // Incrementally updated servo position
// ==== LCD Page Lock ====
String lcdState = ""; // Stores the name of the current LCD page
// ======================= SERVO CONTROL =======================
void setServoAngle(int angle) {
targetPos = constrain(angle, 0, 90);
}
void servoSmoothRun() {
// Move the servo slowly, step-by-step (non-blocking)
static unsigned long lastStep = 0;
if (millis() - lastStep >= 15) { // Move every 15 ms
lastStep = millis();
if (currentPos < targetPos) currentPos++;
else if (currentPos > targetPos) currentPos--;
myServo.write(currentPos);
}
}
// ======================= BUZZER =======================
void beepShort() {
tone(buzzerPin, 2000);
delay(80);
noTone(buzzerPin);
}
void beepDenied() {
for (int i = 0; i < 4; i++) {
tone(buzzerPin, 1600); delay(100);
noTone(buzzerPin); delay(100);
}
}
void beepAlarmNonBlock() {
// Non-blocking beeping for smoke alarm
static unsigned long t = 0;
static bool buz = false;
if (millis() - t > 120) {
t = millis();
buz = !buz;
if (buz) tone(buzzerPin, 1500);
else noTone(buzzerPin);
}
}
// ======================= RFID =======================
void getId() {
// Read 4 bytes UID into userIdRead[]
uchar status, str[MAX_LEN];
status = rfid.anticoll(str);
if (status == MI_OK) {
for (int i = 0; i < ID_LEN; i++) userIdRead[i] = str[i];
rfid.halt(); // Stop reading the same card repeatedly
}
}
bool idVerify() {
// Compare scanned UID with authorized UID
for (int i = 0; i < ID_LEN; i++)
if (userIdRead[i] != userId[i]) return false;
return true;
}
void clearBuffer() {
// Clear temporary UID storage
for (int i = 0; i < ID_LEN; i++) userIdRead[i] = 0;
}
// ======================= LCD PAGES =======================
void showNormal() {
lcdState = "normal";
lcd.clear();
lcd.setCursor(0, 0); lcd.print("Door: Locked");
lcd.setCursor(0, 1); lcd.print("Please Tap Card");
}
void showAccessGranted() {
lcdState = "grant";
lcd.clear();
lcd.setCursor(0, 0); lcd.print("Access Granted");
lcd.setCursor(0, 1); lcd.print("Welcome!");
}
void showAccessDenied() {
lcdState = "denied";
lcd.clear();
lcd.setCursor(0, 0); lcd.print("Access Denied");
lcd.setCursor(0, 1); lcd.print("Try Again!");
}
void showSmokeWarning() {
if (lcdState != "smoke") {
lcdState = "smoke";
lcd.clear();
lcd.setCursor(0, 1); lcd.print("Run Away!!!");
}
lcd.setCursor(0, 0); lcd.print("Smoke: ");
lcd.print(smokeValue);
lcd.print(" "); // Clear leftover digits
}
// ======================= SETUP =======================
void setup() {
rfid.begin(7, 5, 4, 3, 6, 2); // RFID pins (library specific)
rfid.init();
pinMode(buzzerPin, OUTPUT);
myServo.attach(servoPin);
myServo.write(0); // Start fully closed
currentPos = 0;
targetPos = 0;
lcd.init();
lcd.backlight();
showNormal();
}
// ======================= MAIN LOOP =======================
void loop() {
smokeValue = analogRead(smokePin); // Read smoke sensor value
// ===== RFID Door Flow =====
if (cardAction) {
if (currentPos < 90) { // Opening door
servoSmoothRun();
} else { // Door fully open → hold 1.5 seconds
if (cardTimer == 0) cardTimer = millis();
if (millis() - cardTimer >= 1500) {
setServoAngle(0); // Start closing
}
servoSmoothRun();
}
}
// ===== After Servo Fully Closed → Clear State & Restore LCD =====
if (!smokeAlert && currentPos <= 3 && targetPos == 0 && lcdState != "normal") {
cardAction = false; // FIX: allow second unlock!
cardTimer = 0; // Reset timer
lcdState = ""; // Unlock LCD state
showNormal(); // Main screen
}
// ===== Smoke Detection =====
bool allowRFID = true; // Disabled when smoke detected
if (smokeValue > smokeThreshold) {
smokeAlert = true;
smokeRecovering = false;
setServoAngle(90); // Safety: force door open
beepAlarmNonBlock();
showSmokeWarning();
allowRFID = false;
}
else {
if (smokeAlert) {
// Smoke dropped → enter recovery buffer 1.5 seconds
if (!smokeRecovering) {
smokeRecovering = true;
smokeRecoverStart = millis();
}
if (millis() - smokeRecoverStart < 1500) {
beepAlarmNonBlock();
showSmokeWarning();
allowRFID = false;
}
else {
// Smoke cleared → close door
smokeAlert = false;
smokeRecovering = false;
setServoAngle(0);
noTone(buzzerPin);
allowRFID = true;
}
}
}
// ===== RFID Scan =====
if (allowRFID && !cardAction) {
uchar status, str[MAX_LEN];
status = rfid.request(PICC_REQIDL, str);
if (status == MI_OK) {
getId();
if (idVerify()) { // Authorized card
beepShort();
showAccessGranted();
setServoAngle(90);
cardAction = true;
cardTimer = 0;
}
else { // Unauthorized card
showAccessDenied();
beepDenied();
delay(800);
showNormal();
}
clearBuffer();
}
}
// Keep servo moving smoothly
servoSmoothRun();
}