Radar Guard 8.0
Note
🌟 Welcome to the SunFounder Facebook Community! Whether you’re into Raspberry Pi, Arduino, or ESP32, you’ll find inspiration, help ideas here.
✅ Be the first to get free learning resources.
✅ Stay updated on new products & exclusive giveaways.
✅ Share your creations and get real feedback.
Kit purchase
Looking for parts? Check out our all-in-one kits below — packed with components, beginner-friendly guides, and tons of fun.
Name |
Includes Arduino board |
PURCHASE LINK |
|---|---|---|
Ultimate Sensor Kit |
Arduino Uno R4 Minima |
|
Elite Explorer Kit |
Arduino Uno R4 WiFi |
|
3 in 1 Ultimate Starter Kit |
Arduino Uno R4 Minima |
|
Universal Maker Sensor Kit |
× |
Course Introduction
In this project, we’ll build a Radar Warning System using an ultrasonic sensor, servo, LCD, stepper motor, and buzzer.
The servo scans the area, and when an object comes within 20 cm, the system enters ALERT mode: the LCD shows a warning, the red LED and buzzer blink, and the stepper motor sweeps back and forth. Once the object leaves, the system resets to normal with the green LED on and “Area is Empty” displayed.
Note
If this is your first time working with an Arduino project, we recommend downloading and reviewing the basic materials first.
Required Components
In this project, we need the following components:
SN |
COMPONENT INTRODUCTION |
QUANTITY |
PURCHASE LINK |
|---|---|---|---|
1 |
Arduino UNO R4 Minima/Arduino UNO R4 WIFI |
1 |
|
2 |
USB Type-C cable |
1 |
|
3 |
Breadboard |
1 |
|
4 |
Wires |
Several |
|
5 |
Ultrasonic Sensor Module |
1 |
|
6 |
I2C LCD 1602 |
1 |
|
7 |
Digital Servo Motor |
1 |
|
8 |
Passive Buzzer |
1 |
|
9 |
1kΩ resistor |
4 |
|
10 |
LED |
4 |
|
11 |
Stepper Motor 28BYJ-48 ULN2003 Drive Module 5 |
1 |
Wiring
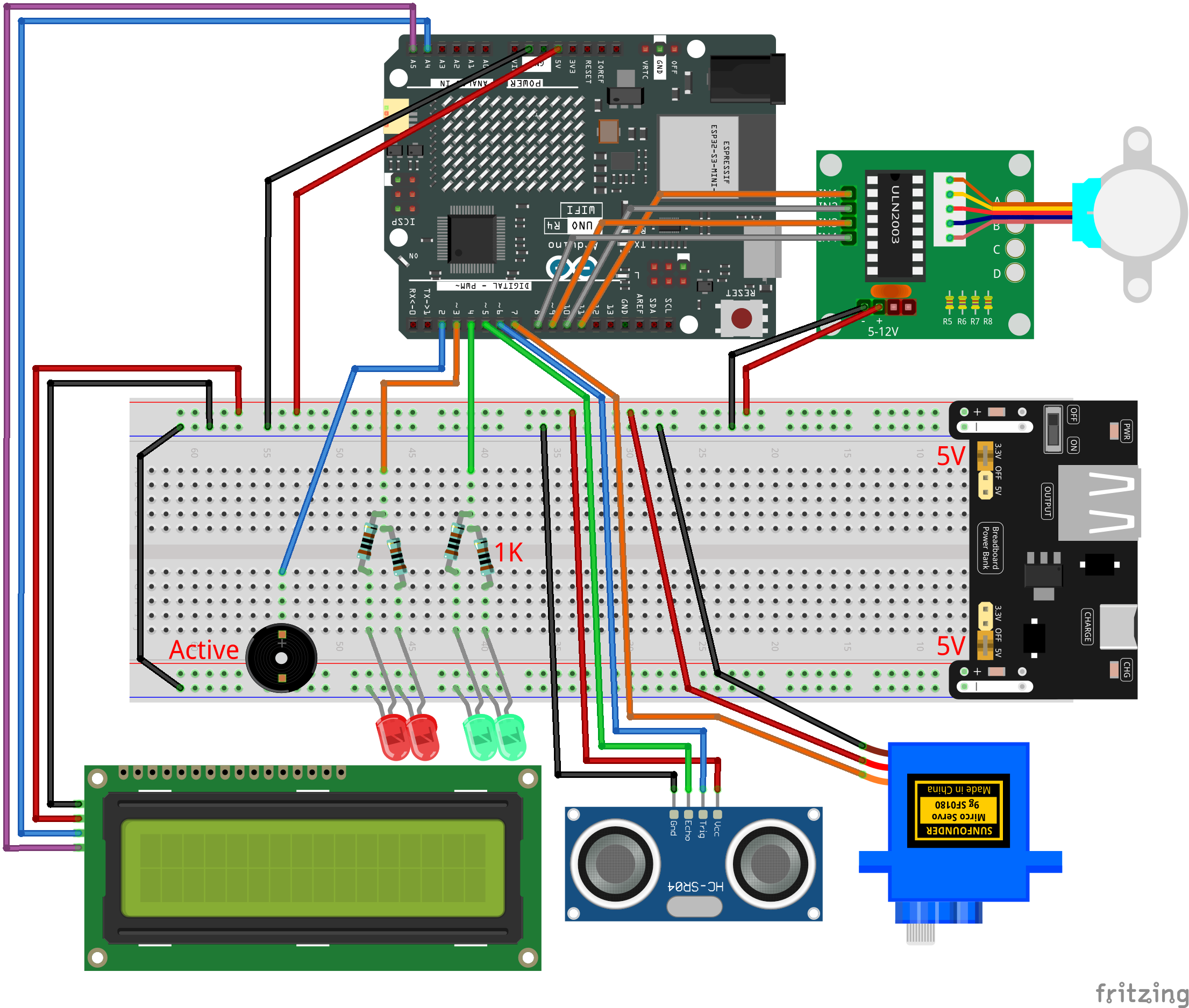
Common Connections:
LED
Red LED: Connect the LEDs anode to a 1kΩ resistor then to the 3 on Arduino, and the LEDs cathode to negative power bus on the breadboard.
Green LED: Connect the LEDs anode to a 1kΩ resistor then to the 4 on Arduino, and the LEDs cathode to negative power bus on the breadboard.
Digital Servo Motor
Connect to breadboard’s positive power bus.
Connect to breadboard’s negative power bus.
Connect to 7 on the Arduino.
Buzzer
Connect to breadboard’s negative power bus.
Connect to 2 on the Arduino.
Ultrasonic Sensor Module
Trig: Connect to 6 on the Arduino.
Echo: Connect to 5 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Stepper Motor 28BYJ-48 ULN2003 Drive Module 5
IN1: Connect to 11 on the Arduino.
IN2: Connect to 10 on the Arduino.
IN3: Connect to 9 on the Arduino.
IN4: Connect to 8 on the Arduino.
I2C LCD 1602
SDA: Connect to A4 on the Arduino.
SCL: Connect to A5 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Writing the Code
Note
You can copy this code into Arduino IDE.
To install the library, use the Arduino Library Manager and search for LiquidCrystal_I2C and Stepper and install it.
Don’t forget to select the board(Arduino UNO R4 WIFI) and the correct port before clicking the Upload button.
#include <Servo.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <Stepper.h>
// --------------------- Pins ---------------------
// Ultrasonic
const int trigPin = 6;
const int echoPin = 5;
// Servo (scanner)
const int servoPin = 7;
// LEDs & Active Buzzer
const int redLed = 3;
const int greenLed = 4;
const int buzzer = 2; // Active buzzer: HIGH=on, LOW=off
// LCD
LiquidCrystal_I2C lcd(0x27, 16, 2); // if no display, try 0x3F
// Stepper (28BYJ-48 + ULN2003) IN1→8, IN2→9, IN3→10, IN4→11
const int IN1 = 8;
const int IN2 = 9;
const int IN3 = 10;
const int IN4 = 11;
const int stepsPerRevolution = 2048; // typical for 28BYJ-48
const int stepperRPM = 16;
// Phase order (common): IN1, IN3, IN2, IN4; if not working, try IN1,IN2,IN3,IN4
Stepper stepperMotor(stepsPerRevolution, IN1, IN3, IN2, IN4);
// --------------------- Scan settings ---------------------
Servo radarServo;
const int alertDistance = 20; // cm
const unsigned long updateInterval = 20; // ms per servo tick
int currentAngle = 0;
int increment = 1;
unsigned long lastServoUpdate = 0;
// Detection threshold
const uint8_t ENTER_HITS = 3; // Enter ALERT after 3 consecutive hits
int triggerCount = 0;
// --------------------- Beep/Blink (100ms) ---------------------
unsigned long lastBlinkTs = 0;
bool blinkOn = false;
// --------------------- Helpers (decl) ---------------------
float getDistance();
float getDistanceMedian3();
void setNormalState();
void lcdSetEmpty();
void lcdSetWarning();
void doSweepWithBeepBlink(); // Perform 0→180→0 sweep, with LED/Buzzer blinking
// --------------------- Setup ---------------------
void setup() {
radarServo.attach(servoPin);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(redLed, OUTPUT);
pinMode(greenLed, OUTPUT);
pinMode(buzzer, OUTPUT);
lcd.init();
lcd.backlight();
lcd.clear();
stepperMotor.setSpeed(stepperRPM);
lcdSetEmpty();
setNormalState();
}
// --------------------- Main Loop ---------------------
void loop() {
unsigned long now = millis();
// Servo scanning (only when not in ALERT mode)
if (now - lastServoUpdate >= updateInterval) {
lastServoUpdate = now;
radarServo.write(currentAngle);
// Distance measurement every 5 degrees
if (currentAngle % 5 == 0) {
float d = getDistanceMedian3();
if (d < alertDistance) triggerCount++;
else triggerCount = 0;
// Enter ALERT after enough hits
if (triggerCount >= ENTER_HITS) {
triggerCount = 0;
// Show warning on LCD, turn off green LED
lcdSetWarning();
digitalWrite(greenLed, LOW);
// Loop: after each full sweep, check distance again
while (true) {
doSweepWithBeepBlink(); // Perform 0→180→0 sweep with LED/Buzzer
// After sweep, check if object is still present
float d2 = getDistanceMedian3();
if (d2 >= alertDistance) {
// No object → exit ALERT
break;
}
// Still detected → repeat another sweep
}
// Stop buzzer and LED, restore normal state
blinkOn = false;
digitalWrite(redLed, LOW);
digitalWrite(buzzer, LOW);
setNormalState();
lcdSetEmpty();
}
}
// Update scanning angle
currentAngle += increment;
if (currentAngle >= 180) { currentAngle = 180; increment = -1; }
else if (currentAngle <= 0) { currentAngle = 0; increment = 1; }
}
}
// --------------------- Sweep (0→180→0) with Beep/Blink ---------------------
// Perform one complete sweep 0→180→0 smoothly,
// with LED and buzzer toggling every 100ms during the motion.
void doSweepWithBeepBlink() {
const int halfTurnSteps = stepsPerRevolution / 2; // 180°
// Reset blinking state
lastBlinkTs = millis();
blinkOn = false;
digitalWrite(redLed, LOW);
digitalWrite(buzzer, LOW);
// Forward half-turn
for (int i = 0; i < halfTurnSteps; i++) {
stepperMotor.step(1);
unsigned long now = millis();
if (now - lastBlinkTs >= 100) {
lastBlinkTs = now;
blinkOn = !blinkOn;
digitalWrite(redLed, blinkOn ? HIGH : LOW);
digitalWrite(buzzer, blinkOn ? HIGH : LOW);
}
}
// Backward half-turn
for (int i = 0; i < halfTurnSteps; i++) {
stepperMotor.step(-1);
unsigned long now = millis();
if (now - lastBlinkTs >= 100) {
lastBlinkTs = now;
blinkOn = !blinkOn;
digitalWrite(redLed, blinkOn ? HIGH : LOW);
digitalWrite(buzzer, blinkOn ? HIGH : LOW);
}
}
// At the end, ensure LED and buzzer are off
digitalWrite(redLed, LOW);
digitalWrite(buzzer, LOW);
}
// --------------------- Distance (median filter) ---------------------
float getDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
unsigned long duration = pulseIn(echoPin, HIGH, 30000UL);
if (duration == 0) return 9999.0; // Timeout → very far
return duration * 0.034f / 2.0f; // Convert to cm
}
float getDistanceMedian3() {
float a = getDistance();
float b = getDistance();
float c = getDistance();
// Return the median of three readings
if (a > b) { float t = a; a = b; b = t; }
if (b > c) { float t = b; b = c; c = t; }
if (a > b) { float t = a; a = b; b = t; }
return b;
}
// --------------------- UI helpers ---------------------
void setNormalState() {
digitalWrite(greenLed, HIGH);
digitalWrite(redLed, LOW);
digitalWrite(buzzer, LOW);
}
void lcdSetEmpty() {
lcd.clear();
lcd.setCursor(1, 0); // Centered "Area is Empty"
lcd.print("Area is Empty");
lcd.setCursor(0, 1);
lcd.print(" ");
}
void lcdSetWarning() {
lcd.clear();
lcd.setCursor(4, 0); // Centered "WARNING!!"
lcd.print("WARNING!!");
lcd.setCursor(2, 1); // Centered "Foreign Body"
lcd.print("Foreign Body");
}