Radar Guard 5.0
Note
🌟 Welcome to the SunFounder Facebook Community! Whether you’re into Raspberry Pi, Arduino, or ESP32, you’ll find inspiration, help ideas here.
✅ Be the first to get free learning resources.
✅ Stay updated on new products & exclusive giveaways.
✅ Share your creations and get real feedback.
Kit purchase
Looking for parts? Check out our all-in-one kits below — packed with components, beginner-friendly guides, and tons of fun.
Name |
Includes Arduino board |
PURCHASE LINK |
|---|---|---|
Ultimate Sensor Kit |
Arduino Uno R4 Minima |
|
Elite Explorer Kit |
Arduino Uno R4 WiFi |
|
3 in 1 Ultimate Starter Kit |
Arduino Uno R4 Minima |
|
Universal Maker Sensor Kit |
× |
Course Introduction
This project uses an ultrasonic sensor, a servo motor, and an Arduino to create a simple radar system with LED and buzzer alerts.
The servo rotates the sensor to scan for obstacles. If an object is within a set distance, a red LED and buzzer are activated. Otherwise, a green LED shows it’s clear.
Angle and distance data are sent via the serial port for monitoring.
Note
If this is your first time working with an Arduino project, we recommend downloading and reviewing the basic materials first.
Required Components
In this project, we need the following components:
SN |
COMPONENT INTRODUCTION |
QUANTITY |
PURCHASE LINK |
|---|---|---|---|
1 |
Arduino UNO R4 Minima |
1 |
|
2 |
USB Type-C cable |
1 |
|
3 |
Breadboard |
1 |
|
4 |
Wires |
Several |
|
5 |
Ultrasonic Sensor Module |
1 |
|
6 |
Digital Servo Motor |
1 |
|
7 |
Buzzer |
1 |
|
8 |
LED |
2 |
|
9 |
1kΩ resistor |
2 |
Wiring
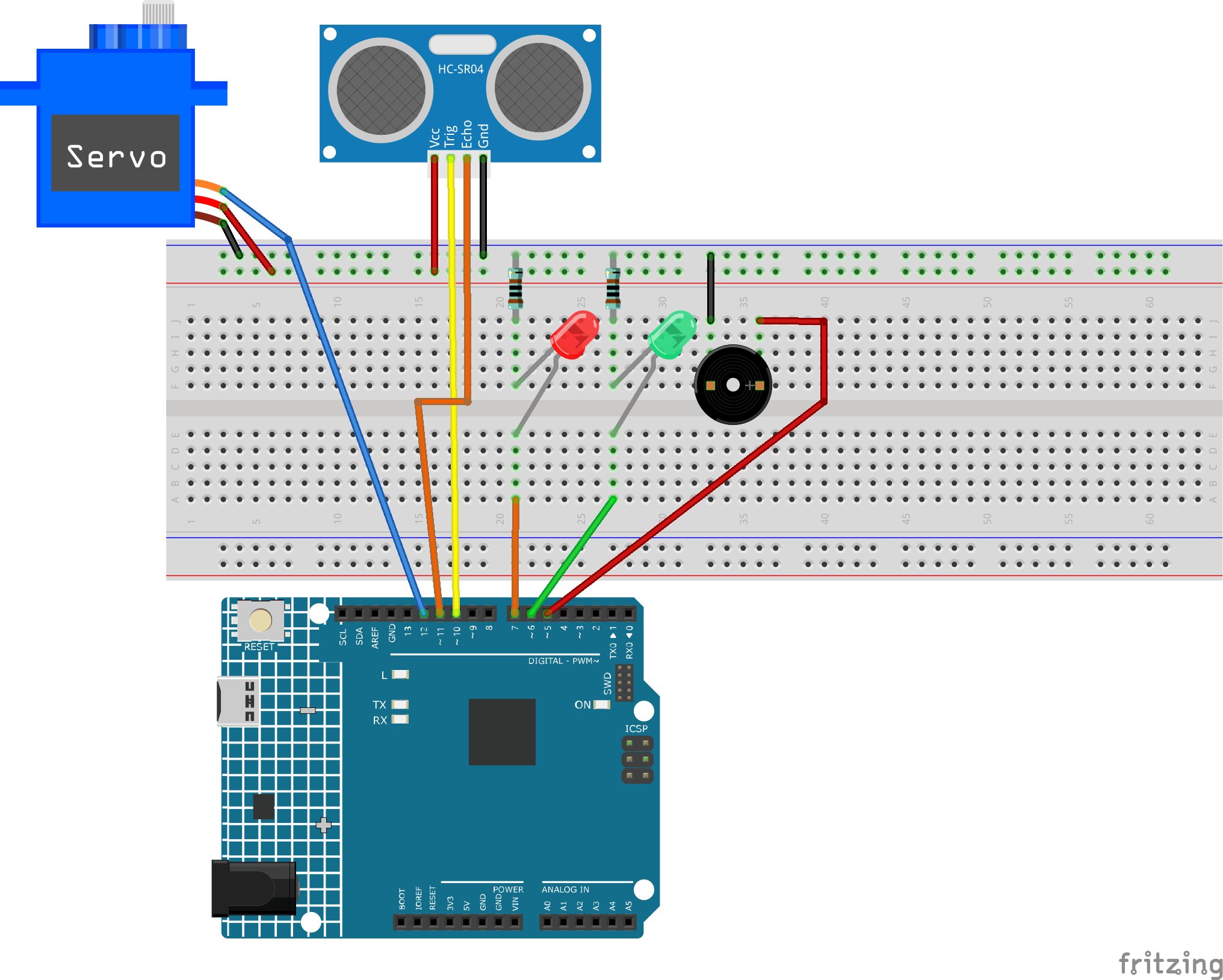
Common Connections:
LED
Connect the LEDs anode to the 3, 4 on Arduino, and the LEDs cathode to a 1kΩ resistor then to negative power bus on the breadboard.
Buzzer
+: Connect to breadboard’s positive power bus.
-: Connect to transistor.
Digital Servo Motor
Connect to breadboard’s positive power bus.
Connect to breadboard’s negative power bus.
Connect to 12 on the Arduino.
Ultrasonic Sensor Module
Trig: Connect to 10 on the Arduino.
Echo: Connect to 11 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Writing the Code
Note
Build the circuit.
Upload the code to the Arduino board using Arduino IDE.
In the Arduino IDE, check the current Arduino port(COMx).
The
ArduinoRadarGUIis used here. You can click hereArduinoSonarGUI.zipto download it.Open ArduinoLidarGUI.pde in the Processing IDE .
Modify the code in line 35 to ensure the correct port number(COMx).
Run the Processing sketch to visualize the Lidar data.
/*
Modified Arduino Radar Code with LED and Buzzer Alerts
*/
#include <Servo.h>
// Ultrasonic sensor pins
const int trigPin = 10;
const int echoPin = 11;
const int servoPin = 12;
Servo myServo;
// LEDs and buzzer pins
const int redLED = 7;
const int greenLED = 6;
const int buzzerPin = 5;
// Distance threshold in cm
const int threshold = 50;
long duration;
int distance;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(redLED, OUTPUT);
pinMode(greenLED, OUTPUT);
pinMode(buzzerPin, OUTPUT);
Serial.begin(9600);
myServo.attach(servoPin);
}
void loop() {
for (int i = 15; i <= 165; i++) {
myServo.write(i);
delay(30);
distance = calculateDistance();
alertSystem(distance);
sendData(i, distance);
}
for (int i = 165; i > 15; i--) {
myServo.write(i);
delay(30);
distance = calculateDistance();
alertSystem(distance);
sendData(i, distance);
}
}
int calculateDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
float distance = pulseIn(echoPin, HIGH) / 58.00;
return (int)distance;
}
void alertSystem(int dist) {
if (dist > 0 && dist <= threshold) {
digitalWrite(redLED, HIGH);
digitalWrite(greenLED, LOW);
int beepDelay = map(dist, 1, threshold, 50, 300); // Closer = faster beep
digitalWrite(buzzerPin, HIGH);
delay(5);
digitalWrite(buzzerPin, LOW);
delay(beepDelay);
} else {
digitalWrite(redLED, LOW);
digitalWrite(greenLED, HIGH);
digitalWrite(buzzerPin, LOW);
}
}
void sendData(int angle, int dist) {
Serial.print(angle);
Serial.print(",");
Serial.print(dist);
Serial.print(".");
}