Radar Guard 7.0
Note
🌟 Welcome to the SunFounder Facebook Community! Whether you’re into Raspberry Pi, Arduino, or ESP32, you’ll find inspiration, help ideas here.
✅ Be the first to get free learning resources.
✅ Stay updated on new products & exclusive giveaways.
✅ Share your creations and get real feedback.
Kit purchase
Looking for parts? Check out our all-in-one kits below — packed with components, beginner-friendly guides, and tons of fun.
Name |
Includes Arduino board |
PURCHASE LINK |
|---|---|---|
Ultimate Sensor Kit |
Arduino Uno R4 Minima |
|
Elite Explorer Kit |
Arduino Uno R4 WiFi |
|
3 in 1 Ultimate Starter Kit |
Arduino Uno R4 Minima |
|
Universal Maker Sensor Kit |
× |
Course Introduction
In this lesson, we’ll build a Radar Bomb Simulator using an ultrasonic sensor, a servo, a 4-digit display, and a buzzer.
The servo sweeps the ultrasonic sensor to detect objects. If something enters within 15 cm, a countdown appears on the display with beeping sounds that speed up as the target gets closer. At just 2 cm, the system simulates an explosion with flashing and a continuous alarm.
Note
If this is your first time working with an Arduino project, we recommend downloading and reviewing the basic materials first.
Required Components
In this project, we need the following components:
SN |
COMPONENT INTRODUCTION |
QUANTITY |
PURCHASE LINK |
|---|---|---|---|
1 |
Arduino UNO R4 Minima/Arduino UNO R4 WIFI |
1 |
|
2 |
USB Type-C cable |
1 |
|
3 |
Breadboard |
1 |
|
4 |
Wires |
Several |
|
5 |
Ultrasonic Sensor Module |
1 |
|
6 |
I2C LCD 1602 |
1 |
|
7 |
4-Digit Segment Display Module |
1 |
|
8 |
Passive Buzzer |
1 |
Wiring
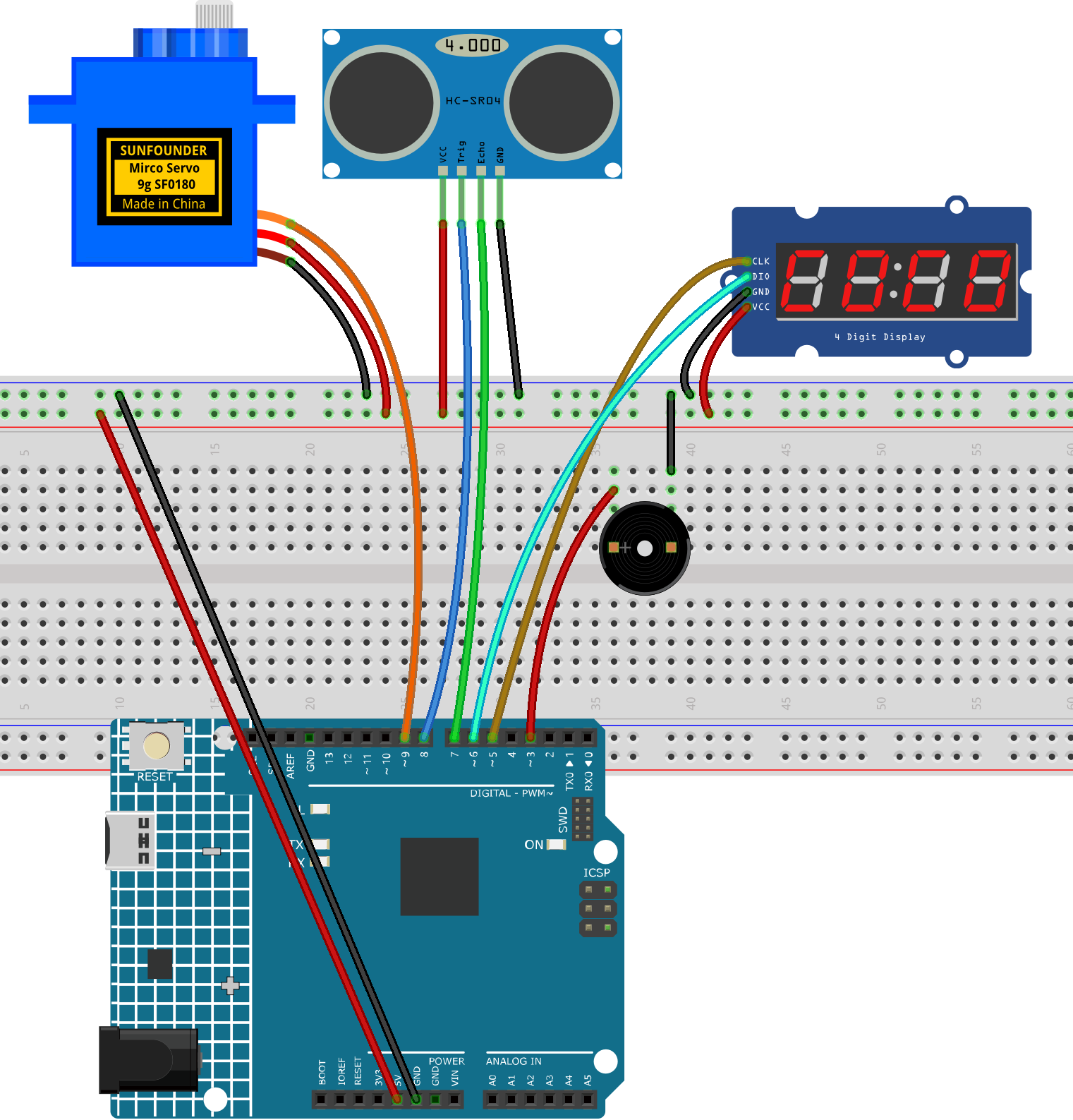
Common Connections:
Digital Servo Motor
Connect to breadboard’s positive power bus.
Connect to breadboard’s negative power bus.
Connect to 9 on the Arduino.
Buzzer
Connect to breadboard’s negative power bus.
Connect to 3 on the Arduino.
4-Digit Segment Display Module
CLK: Connect to 5 on the Arduino.
DIO: Connect to 6 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Ultrasonic Sensor Module
Trig: Connect to 8 on the Arduino.
Echo: Connect to 7 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
Writing the Code
Note
You can copy this code into Arduino IDE.
To install the library, use the Arduino Library Manager and search for TM1637Display and install it.
Don’t forget to select the board(Arduino UNO R4 WIFI) and the correct port before clicking the Upload button.
#include <Servo.h>
#include <TM1637Display.h>
// ------------------- Pin Definitions -------------------
#define TRIG_PIN 8
#define ECHO_PIN 7
#define SERVO_PIN 9
#define BUZZER_PIN 3
// TM1637 4-digit display
#define TM_CLK_PIN 5
#define TM_DIO_PIN 6
// ------------------- Objects -------------------
Servo radarServo;
TM1637Display display(TM_CLK_PIN, TM_DIO_PIN);
// ------------------- Parameters -------------------
// Servo scanning angle and speed
const int SERVO_MIN_ANGLE = 15; // Left limit
const int SERVO_MAX_ANGLE = 165; // Right limit
const int SERVO_STEP_DEG = 2; // Step angle
const unsigned long SERVO_STEP_MS = 20; // Interval per step (ms)
// Distance thresholds (cm)
const int ALERT_DISTANCE_CM = 15; // Start countdown threshold
const int EXPLODE_DISTANCE_CM = 2; // Immediate "explosion" threshold
// Map distance to countdown interval (closer = faster)
const unsigned long COUNT_INTERVAL_MIN_MS = 120; // Fastest interval
const unsigned long COUNT_INTERVAL_MAX_MS = 800; // Slowest interval
// Countdown settings
const int COUNT_START = 9; // Starting countdown value
const int COUNT_END = 0; // End
// State machine
enum State { SCANNING, COUNTDOWN, EXPLODED };
State state = SCANNING;
// Scanning variables
int servoAngle = SERVO_MIN_ANGLE;
int servoDir = +1;
unsigned long lastServoStepMs = 0;
// Distance measurement
long readDistanceCm() {
// Trigger ultrasonic
pinMode(TRIG_PIN, OUTPUT);
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(3);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// Echo
pinMode(ECHO_PIN, INPUT);
unsigned long dur = pulseIn(ECHO_PIN, HIGH, 30000UL); // 30ms timeout
if (dur == 0) return -1; // Timeout/invalid
long dist = (long)(dur * 0.034f / 2.0f); // μs -> cm
return dist;
}
// Average multiple measurements to reduce jitter
long readDistanceAvg(uint8_t samples = 3) {
long sum = 0; int cnt = 0;
for (uint8_t i = 0; i < samples; i++) {
long d = readDistanceCm();
if (d > 0) { sum += d; cnt++; }
delay(5);
}
return (cnt == 0) ? -1 : (sum / cnt);
}
// Display helper: show "----"
void showDashes() {
static const uint8_t dash = 0x40; // Segment code for '-'
uint8_t data[] = { dash, dash, dash, dash };
display.setSegments(data);
}
// Display a positive integer 0~9999 (auto hide leading zero)
void showNumber(int value) {
display.showNumberDec(value, true); // leading_zeros=true (force show leading zero)
}
// "Explosion" effect: flashing + continuous buzzer
void doExplodeEffect(unsigned long durationMs = 2000) {
unsigned long start = millis();
tone(BUZZER_PIN, 2500); // Continuous beep
while (millis() - start < durationMs) {
display.setBrightness(7, true);
delay(80);
display.setBrightness(0, true); // Approximate off to simulate flashing
delay(80);
}
noTone(BUZZER_PIN);
}
// Map distance to countdown interval
unsigned long mapCountIntervalByDistance(long distCm) {
// Clamp: restrict distance to [EXPLODE_DISTANCE_CM, ALERT_DISTANCE_CM]
if (distCm < EXPLODE_DISTANCE_CM) distCm = EXPLODE_DISTANCE_CM;
if (distCm > ALERT_DISTANCE_CM) distCm = ALERT_DISTANCE_CM;
// Closer -> smaller interval (faster)
long iv = map(distCm, EXPLODE_DISTANCE_CM, ALERT_DISTANCE_CM,
COUNT_INTERVAL_MIN_MS, COUNT_INTERVAL_MAX_MS);
if (iv < (long)COUNT_INTERVAL_MIN_MS) iv = COUNT_INTERVAL_MIN_MS;
if (iv > (long)COUNT_INTERVAL_MAX_MS) iv = COUNT_INTERVAL_MAX_MS;
return (unsigned long)iv;
}
// ------------------- Setup -------------------
void setup() {
pinMode(BUZZER_PIN, OUTPUT);
digitalWrite(BUZZER_PIN, LOW);
radarServo.attach(SERVO_PIN);
radarServo.write(servoAngle);
display.setBrightness(7, true); // Brightness: 0~7
showDashes();
// Optional: Serial debug
Serial.begin(115200);
delay(300);
}
// ------------------- Main Loop -------------------
void loop() {
switch (state) {
case SCANNING: {
// Servo scanning
unsigned long now = millis();
if (now - lastServoStepMs >= SERVO_STEP_MS) {
lastServoStepMs = now;
servoAngle += servoDir * SERVO_STEP_DEG;
if (servoAngle >= SERVO_MAX_ANGLE) { servoAngle = SERVO_MAX_ANGLE; servoDir = -1; }
else if (servoAngle <= SERVO_MIN_ANGLE) { servoAngle = SERVO_MIN_ANGLE; servoDir = +1; }
radarServo.write(servoAngle);
}
// Distance measurement
long dist = readDistanceAvg(3);
if (dist > 0) {
// Check explosion threshold
if (dist <= EXPLODE_DISTANCE_CM) {
state = EXPLODED;
break;
}
// Check countdown threshold
if (dist <= ALERT_DISTANCE_CM) {
state = COUNTDOWN;
// Initialize countdown params
}
}
// Show "----" while scanning
showDashes();
} break;
case COUNTDOWN: {
// Real-time distance -> dynamic speed
long dist = readDistanceAvg(3);
if (dist <= 0 || dist > ALERT_DISTANCE_CM + 3) {
// Target moved away, back to scanning
state = SCANNING;
showDashes();
noTone(BUZZER_PIN);
break;
}
if (dist <= EXPLODE_DISTANCE_CM) {
state = EXPLODED;
break;
}
// Countdown (non-blocking)
static int countVal = COUNT_START;
static unsigned long lastTick = 0;
static unsigned long intervalMs = COUNT_INTERVAL_MAX_MS;
// First enter or reset
static bool firstEnter = true;
if (firstEnter) {
countVal = COUNT_START;
lastTick = millis();
intervalMs = mapCountIntervalByDistance(dist);
firstEnter = false;
}
// Update interval dynamically
intervalMs = mapCountIntervalByDistance(dist);
// Show countdown number
showNumber(countVal);
// Each tick -> decrement, short beep
unsigned long now = millis();
if (now - lastTick >= intervalMs) {
lastTick = now;
// Short beep: frequency rises as number decreases
int freq = 800 + (COUNT_START - countVal) * 120; // 800Hz ~ ?
tone(BUZZER_PIN, freq, 90); // 90ms beep
if (countVal > COUNT_END) {
countVal--;
} else {
// Reached 0 -> trigger explosion
state = EXPLODED;
firstEnter = true; // Reset when re-enter COUNTDOWN
}
}
// Exit COUNTDOWN -> cleanup
if (state != COUNTDOWN) {
noTone(BUZZER_PIN);
firstEnter = true;
}
} break;
case EXPLODED: {
// Explosion effect
doExplodeEffect(2000); // 2 sec
showDashes();
// Wait until target moves away before reset
while (true) {
long d = readDistanceAvg(3);
if (d <= 0 || d > ALERT_DISTANCE_CM + 5) break;
delay(60);
}
state = SCANNING;
} break;
}
}