Smart Stop 3.0
Note
🌟 Welcome to the SunFounder Facebook Community! Whether you’re into Raspberry Pi, Arduino, or ESP32, you’ll find inspiration, help ideas here.
✅ Be the first to get free learning resources.
✅ Stay updated on new products & exclusive giveaways.
✅ Share your creations and get real feedback.
Kit purchase
Looking for parts? Check out our all-in-one kits below — packed with components, beginner-friendly guides, and tons of fun.

Name |
Includes Arduino board |
PURCHASE LINK |
|---|---|---|
Elite Explorer Kit |
Arduino Uno R4 WiFi |
|
3 in 1 Ultimate Starter Kit |
Arduino Uno R4 Minima |
Course Introduction
In this lesson, you’ll learn how to use an L9110 Motor Driver Module, an Ultrasonic Sensor Module, a buzzer module, a traffic light module and a TT motor with the Arduino UNO R4 to create a Smart Stop 3.0 system.
As the obstacle gets closer to the Ultrasonic Sensor Module, the LCD screen displays the distance to obstacles and the servo speed. When the distance exceeds the predefined safety threshold, the green light switches to a flashing red light as a warning, the TT motor gradually slows down until it comes to a stop.
Note
If this is your first time working with an Arduino project, we recommend downloading and reviewing the basic materials first.
Required Components
In this project, we need the following components:
SN |
COMPONENT INTRODUCTION |
QUANTITY |
PURCHASE LINK |
|---|---|---|---|
1 |
Arduino UNO R4 Minima/Arduino UNO R4 WIFI |
1 |
|
2 |
USB Cable |
1 |
|
3 |
Breadboard |
1 |
|
4 |
Wires |
Several |
|
5 |
L9110 Motor Driver Module |
1 |
|
6 |
Ultrasonic Sensor Module |
1 |
|
7 |
TT Motor |
1 |
|
8 |
Buzzer Modudle |
1 |
|
9 |
Traffic Light LED |
1 |
Wiring
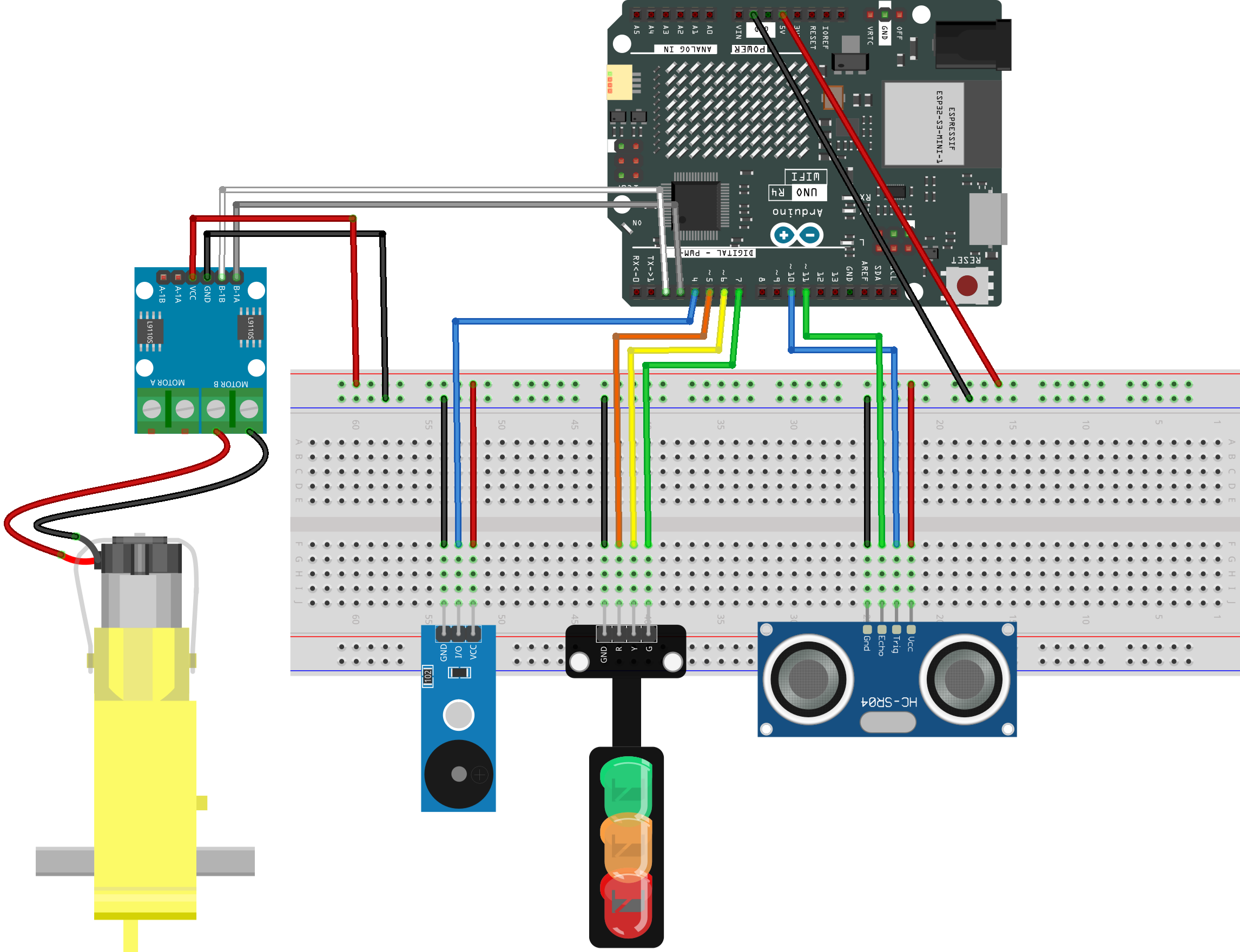
Common Connections:
Ultrasonic Sensor Module
Trig: Connect to 10 on the Arduino.
Echo: Connect to 11 on the Arduino.
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
TT Motor
Connect to MOTOR B on the L9110 Motor Driver Module.
L9110 Motor Driver Module
GND: Connect to breadboard’s negative power bus.
VCC: Connect to breadboard’s red power bus.
B-1B: Connect to 2 on the Arduino.
B-1A: Connect to 3 on the Arduino.
Buzzer Module
I/0: Connect to 4 on the Arduino.
+: Connect to breadboard’s red power bus.
-: Connect to breadboard’s negative power bus.
Traffic light LED
R: Connect to 5 on the Arduino.
Y: Connect to 6 on the Arduino.
G: Connect to 7 on the Arduino.
GND: Connect to breadboard’s negative power bus.
Writing the Code
Note
You can copy this code into Arduino IDE.
Don’t forget to select the board(Arduino UNO R4 WiFi) and the correct port before clicking the Upload button.
// ================= Pin Definitions =================
const int motorPinA = 3; // L9110 B-1A (PWM speed control)
const int motorPinB = 2; // L9110 B-1B (direction)
const int trigPin = 10; // Ultrasonic trigger pin
const int echoPin = 11; // Ultrasonic echo pin
const int buzzerPin = 4; // Passive buzzer
const int redPin = 5; // Traffic light - Red
const int yellowPin = 6; // Traffic light - Yellow
const int greenPin = 7; // Traffic light - Green
// ================= Distance Thresholds (cm) =================
const int STOP_DISTANCE = 5; // Stop when distance < 5 cm
const int SLOW_DISTANCE = 20; // Slow down when distance < 20 cm
// ================= Motor Parameters =================
const int MIN_MOTOR_PWM = 75; // Minimum PWM to make motor rotate
const int MAX_MOTOR_PWM = 255; // Maximum motor speed
// ================= Buzzer Timing =================
unsigned long previousBeepTime = 0;
bool beepState = false;
// ================= Setup =================
void setup() {
pinMode(motorPinA, OUTPUT);
pinMode(motorPinB, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzerPin, OUTPUT);
pinMode(redPin, OUTPUT);
pinMode(yellowPin, OUTPUT);
pinMode(greenPin, OUTPUT);
// Set motor direction (one direction only)
digitalWrite(motorPinB, LOW);
}
// ================= Main Loop =================
void loop() {
int distance = readDistance(); // Get distance in cm
int speed = calculateSpeed(distance); // Convert distance to motor speed
controlMotor(speed); // Drive the motor
updateTrafficLight(distance); // Update traffic lights
updateBuzzer(distance); // Control buzzer sound
delay(50); // Small delay for stable reading
}
// ================= Read Distance =================
int readDistance() {
long duration;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read echo pulse, timeout prevents blocking
duration = pulseIn(echoPin, HIGH, 25000);
if (duration == 0) {
return 100; // No obstacle detected
}
return duration / 58; // Convert to centimeters
}
// ================= Distance to Speed =================
int calculateSpeed(int distance) {
if (distance < STOP_DISTANCE) {
return 0; // Stop motor
}
if (distance < SLOW_DISTANCE) {
// Map distance to valid motor speed range
return map(distance, STOP_DISTANCE, SLOW_DISTANCE - 1,
MIN_MOTOR_PWM, MAX_MOTOR_PWM);
}
return MAX_MOTOR_PWM; // Full speed
}
// ================= Motor Control =================
void controlMotor(int speed) {
analogWrite(motorPinA, speed); // Set motor speed
digitalWrite(motorPinB, LOW); // Fixed direction
}
// ================= Traffic Light Control =================
void updateTrafficLight(int distance) {
digitalWrite(redPin, LOW);
digitalWrite(yellowPin, LOW);
digitalWrite(greenPin, LOW);
if (distance < STOP_DISTANCE) {
digitalWrite(redPin, HIGH); // Stop
} else if (distance < SLOW_DISTANCE) {
digitalWrite(yellowPin, HIGH); // Slow down
} else {
digitalWrite(greenPin, HIGH); // Go
}
}
// ================= Buzzer Control =================
void updateBuzzer(int distance) {
unsigned long currentTime = millis();
if (distance < STOP_DISTANCE) {
// Fast warning beep
if (currentTime - previousBeepTime >= 100) {
previousBeepTime = currentTime;
beepState = !beepState;
beepState ? tone(buzzerPin, 2000) : noTone(buzzerPin);
}
}
else if (distance < SLOW_DISTANCE) {
// Slow warning beep
if (currentTime - previousBeepTime >= 500) {
previousBeepTime = currentTime;
beepState = !beepState;
beepState ? tone(buzzerPin, 800) : noTone(buzzerPin);
}
}
else {
noTone(buzzerPin); // Silent
}
}