Nota
Ciao, benvenuto nella community SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci di nuovi prodotti.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e omaggi festivi: Partecipa a omaggi e promozioni speciali durante le festività.
👉 Pronto per esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
3.1 Sistema di Assistenza al Parcheggio
Panoramica
Con lo sviluppo della scienza e della tecnologia, molte innovazioni hi-tech sono state integrate nelle automobili, tra cui il sistema di assistenza al parcheggio. Qui utilizziamo sensori ultrasonici, LCD, LED e buzzer per creare un semplice sistema di assistenza al parcheggio basato su ultrasuoni.
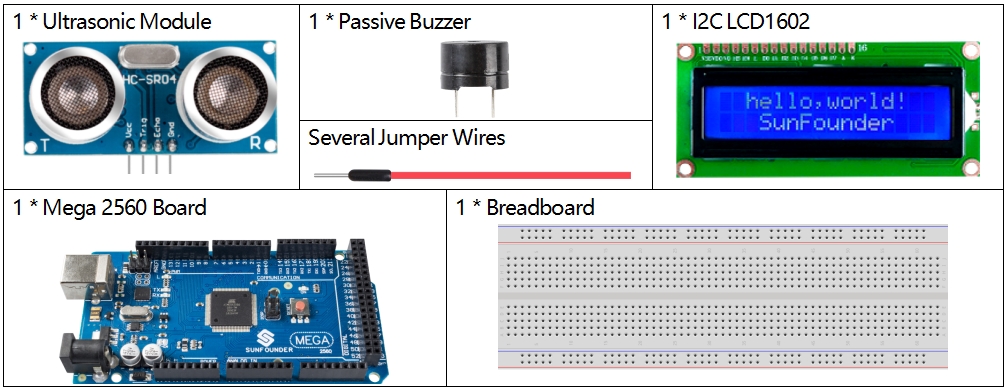
Componenti necessari
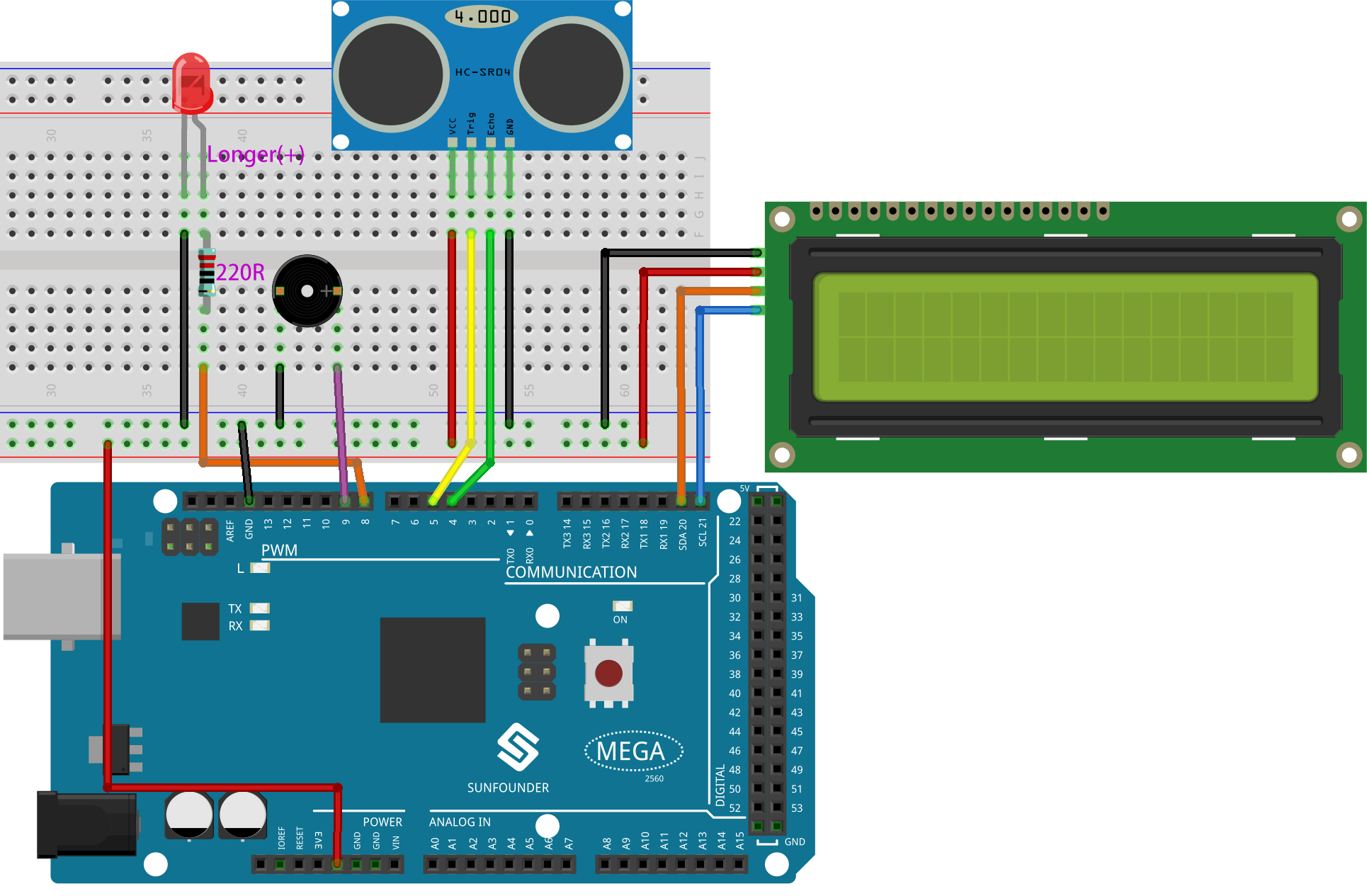
Circuito Fritzing
In questo esempio, il cablaggio è mostrato di seguito.
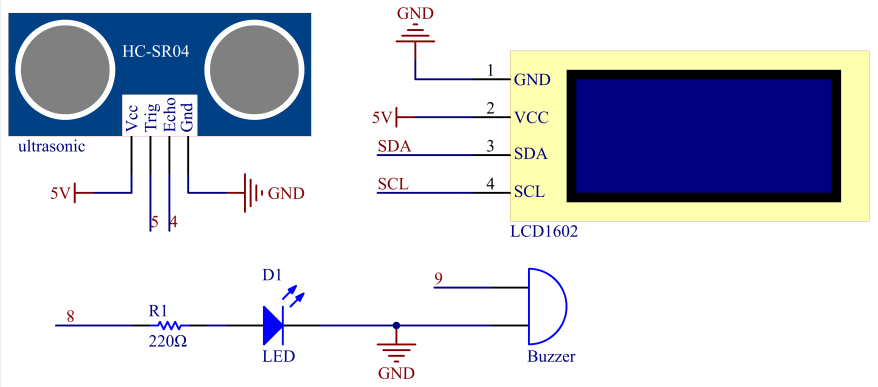
Schema elettrico
Codice
Nota
Puoi aprire direttamente il file
3.1_reversingAid.inonella cartellasunfounder_vincent_kit_for_arduino\code\3.1_reversingAid.Qui viene utilizzata la libreria
LiquidCrystal I2C, che puoi installare dal Library Manager.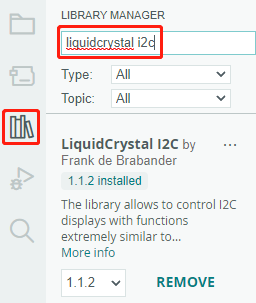
Spiegazione dell’Esempio
Questo codice ci aiuta a creare un semplice dispositivo di misurazione della distanza che misura la distanza tra oggetti e fornisce feedback tramite un display LCD e un buzzer.
La funzione loop() contiene la logica principale del programma e viene eseguita continuamente. Analizziamola nel dettaglio.
Ciclo per leggere la distanza e aggiornare i parametri
Nella funzione
loop, il codice legge la distanza misurata dal modulo ultrasonico e aggiorna il parametro dell’intervallo in base alla distanza.// Aggiorna la distanza distance = readDistance(); // Aggiorna gli intervalli in base alla distanza if (distance <= 10) { intervals = 300; } else if (distance <= 20) { intervals = 500; } else if (distance <= 50) { intervals = 1000; } else { intervals = 2000; }
Controlla se è il momento di emettere un segnale acustico
Il codice calcola la differenza tra il tempo corrente e l’ultimo segnale acustico emesso. Se la differenza è maggiore o uguale al tempo dell’intervallo, attiva il buzzer e aggiorna il tempo dell’ultimo segnale.
unsigned long currentMillis = millis(); if (currentMillis - previousMillis >= intervals) { Serial.println("Beeping!"); beep(); previousMillis = currentMillis; }
Aggiorna il display LCD
Il codice cancella il display LCD e visualizza «Dis:» e la distanza corrente in centimetri sulla prima riga.
lcd.clear(); lcd.setCursor(0, 0); lcd.print("Dis: "); lcd.print(distance); lcd.print(" cm"); delay(100);