Nota
Ciao, benvenuto nella community SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci di nuovi prodotti.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e omaggi festivi: Partecipa a omaggi e promozioni speciali durante le festività.
👉 Pronto per esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
2.34 Modulo MPU6050
Panoramica
In questa lezione, imparerai a utilizzare il modulo MPU6050. Il MPU-6050 è un dispositivo di tracciamento del movimento a 6 assi (giroscopio a 3 assi combinato con accelerometro a 3 assi). È spesso utilizzato per realtà aumentata, stabilizzazione elettronica dell’immagine (EIS: Electronic Image Stabilization), stabilizzazione ottica dell’immagine (OIS: Optical Image Stabilization) e interfacce gestuali «Zero touch».
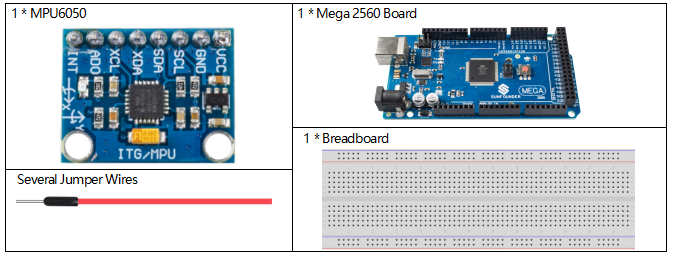
Componenti necessari
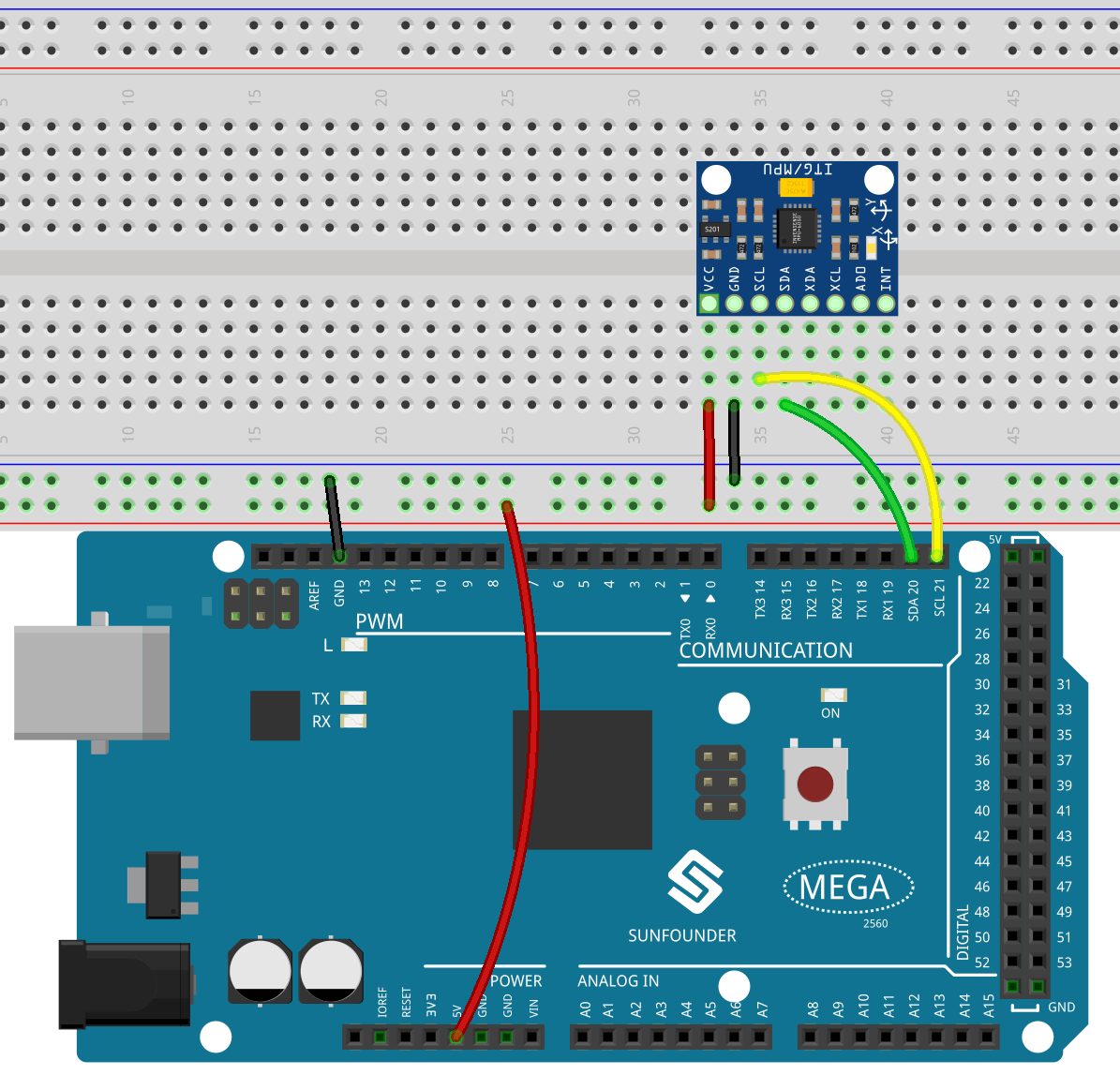
Circuito Fritzing
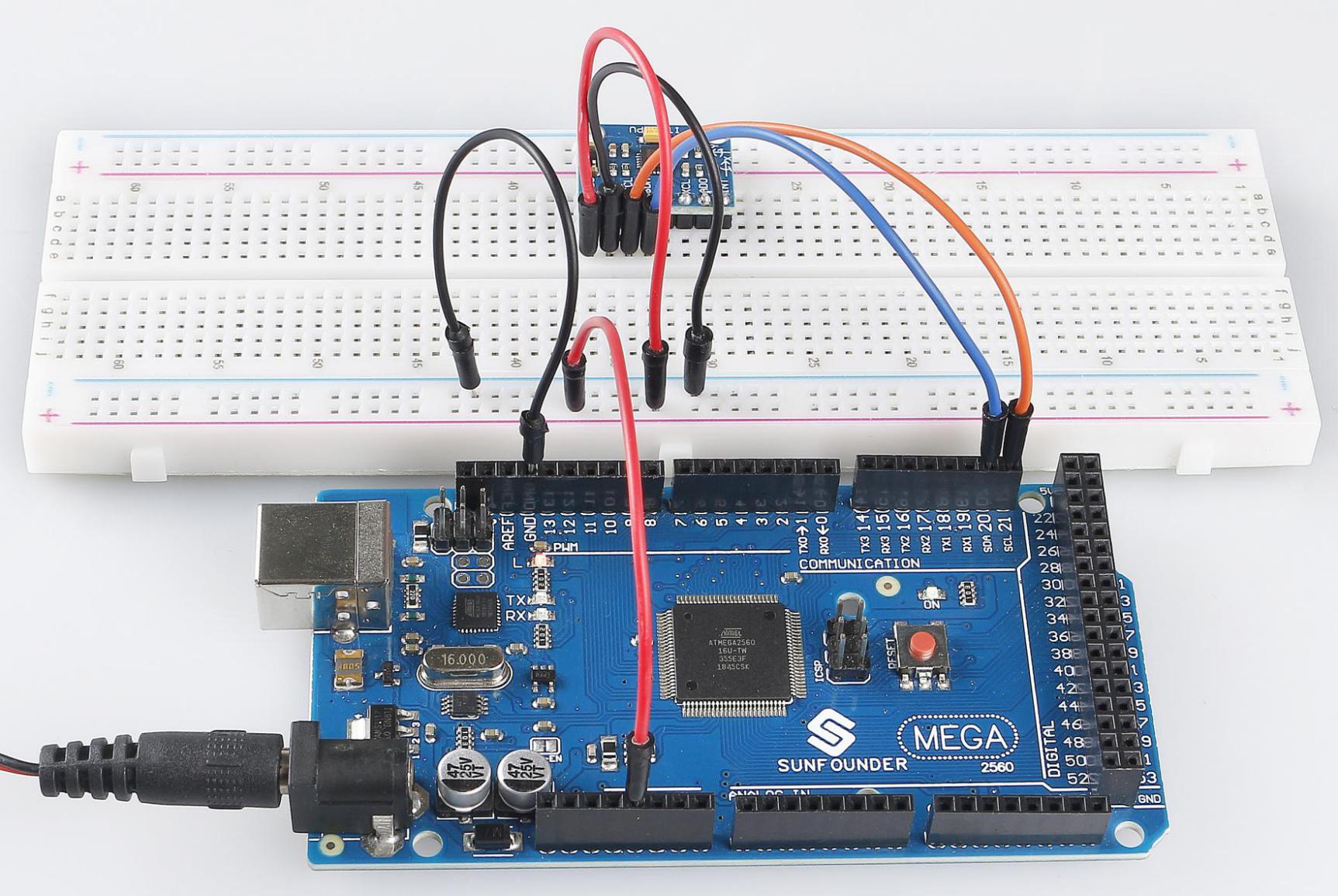
In questo esempio, guidiamo il modulo MPU6050 con IIC. Inseriamo il modulo MPU6050 nel breadboard; colleghiamo il pin VCC al 5V, GND a GND, SCL al pin SCL 21 e SDA al pin SDA 20.
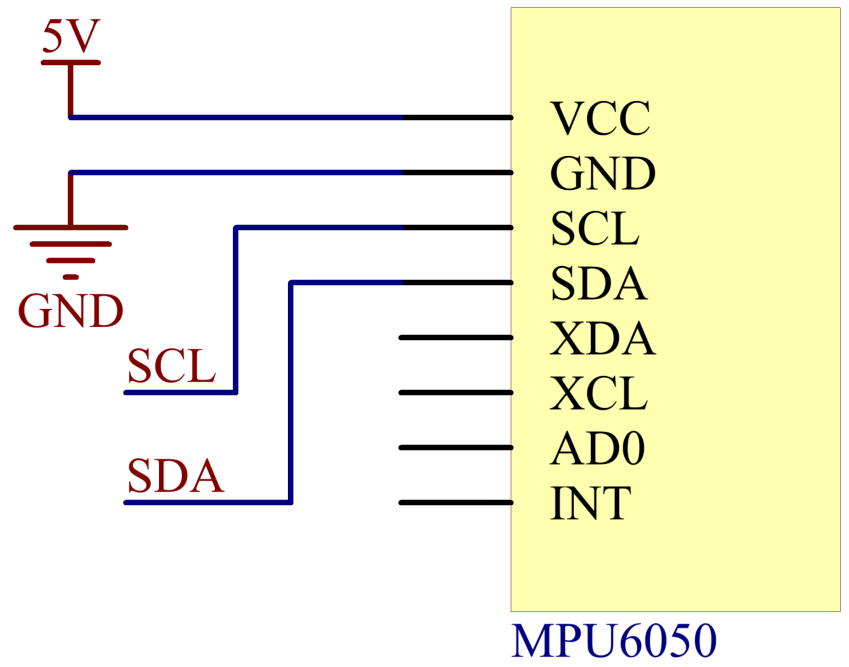
Schema elettrico
Codice
Nota
Puoi aprire direttamente il file
2.34_MPU6050.inonella cartellasunfounder_vincent_kit_for_arduino\code\2.34_MPU6050.Oppure copia questo codice nell’IDE di Arduino.
Dopo aver caricato il codice sulla scheda Mega2560, puoi aprire il monitor seriale per visualizzare l’accelerazione gravitazionale e la velocità angolare dell’MPU6050 in ciascuna direzione.
Analisi del codice
In stato di quiete su un piano, l’accelerazione sull’asse Z è pari a 1 unità gravitazionale, mentre sugli assi X e Y è pari a 0.
Prima di utilizzare il modulo, è necessario eseguire una calibrazione, seguendo i seguenti passaggi:
Posiziona il modulo MPU6050 orizzontalmente su un piano e fissalo con morsetti o nastro adesivo.
Esegui il codice di esempio per ottenere i dati grezzi (RAW DATA) dell’MPU6050 quando è statico.
Aggiungi una compensazione in base alle letture statiche dell’MPU6050.
Esempio di compensazione con il modulo MPU6050 utilizzato:
Serial.print(AcX / 65536 * ACCELE_RANGE - 0.02);
Serial.print(AcY / 65536 * ACCELE_RANGE + 0);
Serial.print(AcZ/65536 * ACCELE_RANGE + 0.02);
Serial.print(GyX / 65536 * GYROSC_RANGE + 1.70);
Serial.print(GyY/65536 * GYROSC_RANGE - 1.70);
Serial.print(GyZ/65536*GYROSC_RANGE + 0.25);
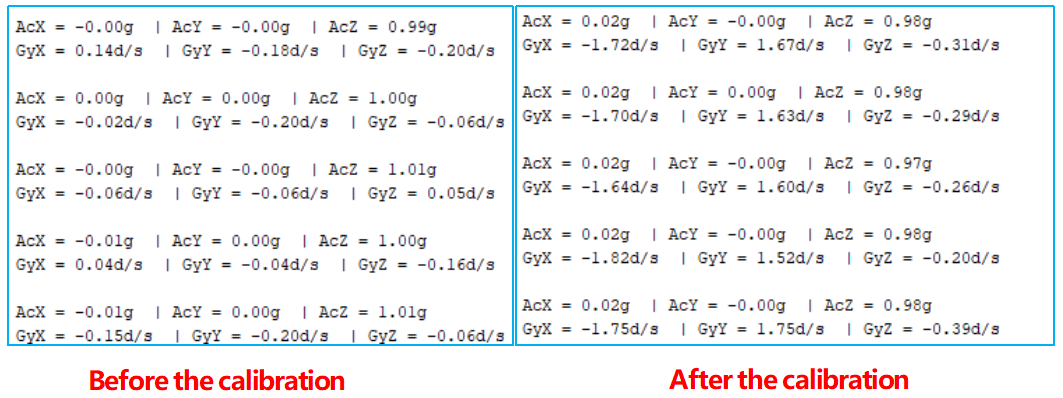
Immagine del fenomeno