Nota
Ciao, benvenuto nella community SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci di nuovi prodotti.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e omaggi festivi: Partecipa a omaggi e promozioni speciali durante le festività.
👉 Pronto per esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
2.33 Modulo Ultrasonico
Panoramica
In questa lezione, imparerai come utilizzare il modulo ultrasonico.
Componenti necessari
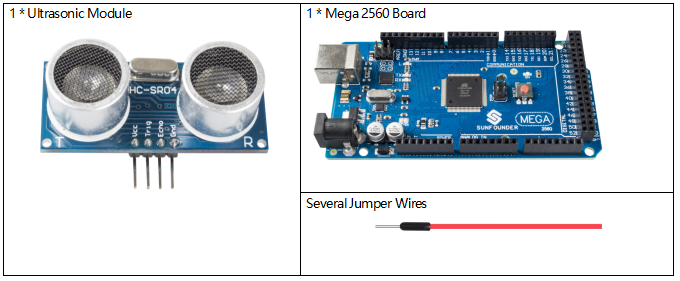
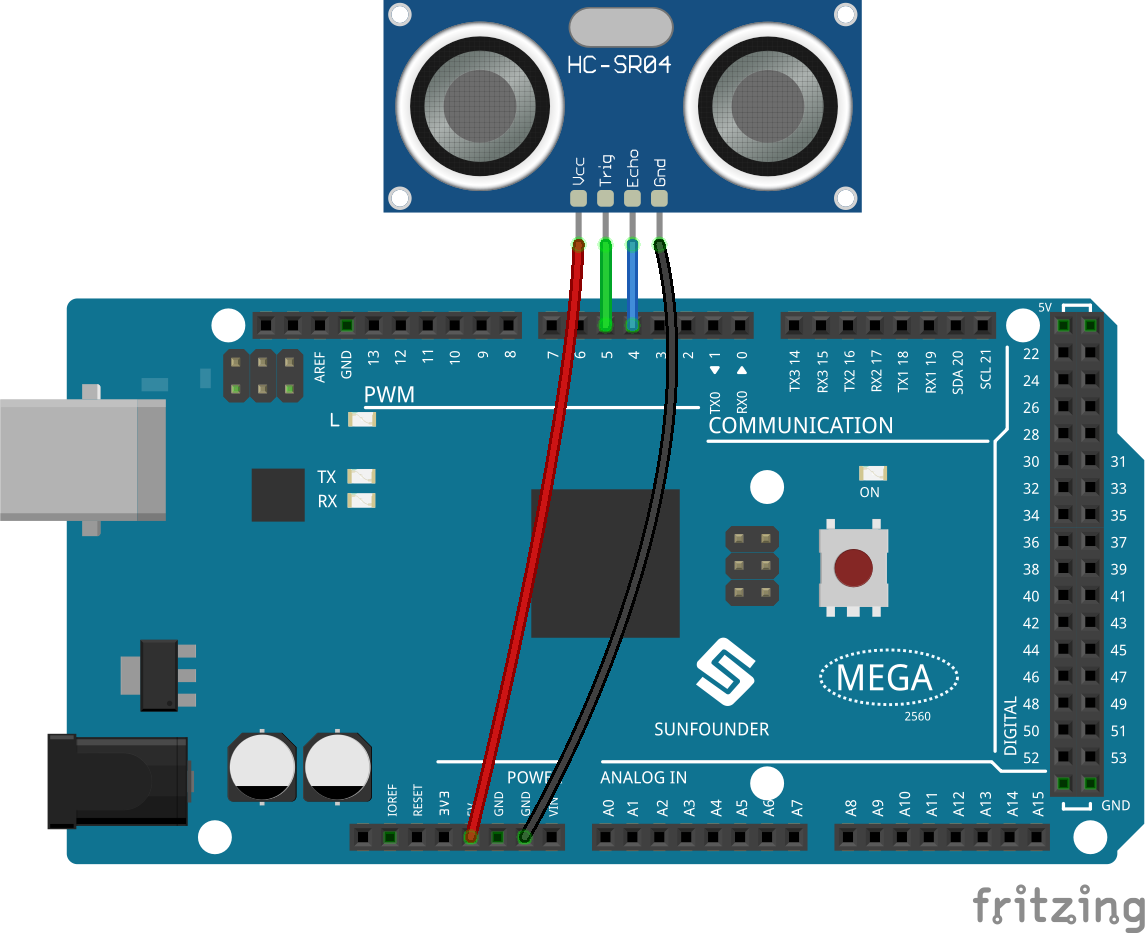
Circuito Fritzing
In questo esempio, colleghiamo direttamente i pin del modulo ultrasonico ai pin della scheda Mega 2560. Successivamente colleghiamo il pin VCC del modulo ultrasonico al 5V, GND a GND, Trig al pin digitale 5, Echo al pin digitale 4.
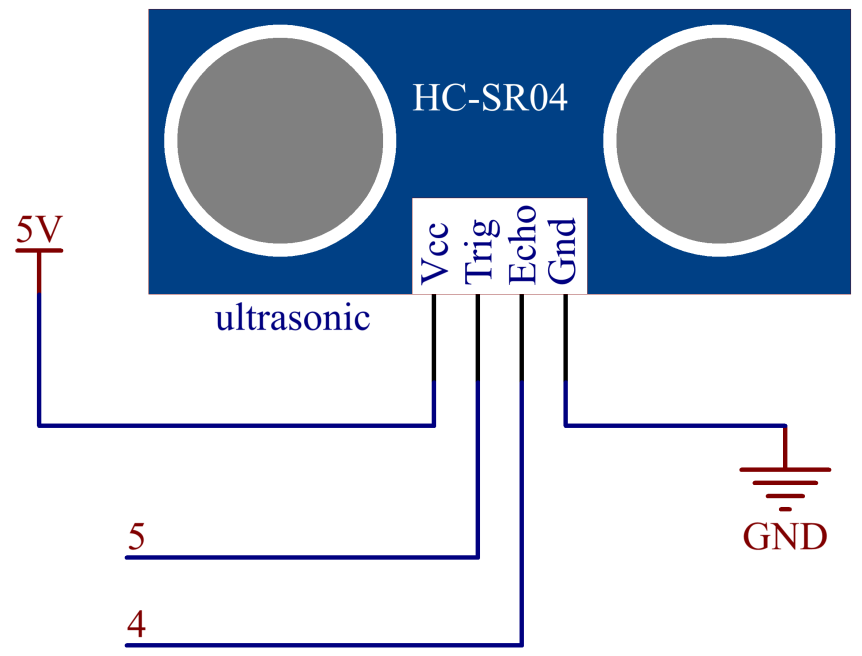
Schema Elettrico
Codice
Nota
Puoi aprire direttamente il file
2.33_ultrasonicModule.inonella cartellasunfounder_vincent_kit_for_arduino\code\2.33_ultrasonicModule.Oppure copia questo codice nell’IDE di Arduino.
Dopo aver caricato il codice sulla scheda Mega2560, il monitor seriale mostrerà la distanza degli ostacoli rilevati dal sensore ultrasonico.
Analisi del codice
Per quanto riguarda l’applicazione del sensore ultrasonico, possiamo verificare direttamente la sottostruttura.
float readSensorData(){// ...}
PING viene attivato da un impulso HIGH di 2 o più microsecondi. (Inviare prima un breve impulso LOW per garantire un impulso HIGH pulito).
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
Il pin echo è utilizzato per leggere il segnale da PING, un impulso HIGH la cui durata è il tempo (in microsecondi) dall’invio del ping alla ricezione dell’eco dall’oggetto.
microsecond=pulseIn(echoPin, HIGH);
La velocità del suono è di 340 m/s, ovvero 29 microsecondi per centimetro.
Questo dà la distanza percorsa dal ping, andata e ritorno, quindi dividiamo per 2 per ottenere la distanza dall’ostacolo.
float distance = microsecond / 29.00 / 2;
Immagine del fenomeno