Nota
Hola, ¡bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook! Profundiza en Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede anticipadamente a anuncios de nuevos productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales por festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.33 Módulo Ultrasónico
Descripción general
En esta lección, aprenderás a utilizar el módulo ultrasónico.
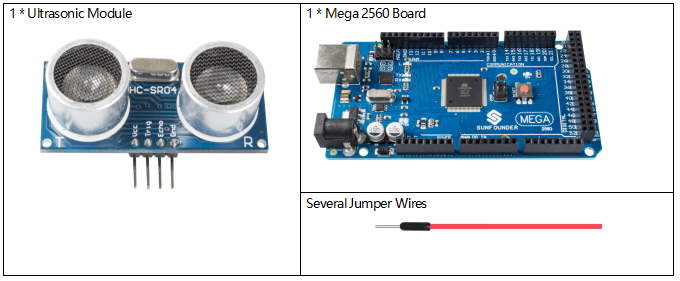
Componentes necesarios
Circuito Fritzing
En este ejemplo, conectamos directamente los pines del módulo ultrasónico con los pines de la placa Mega 2560. Conecta el VCC del módulo ultrasónico a 5V, GND a GND, Trig al pin digital 5 y Echo al pin digital 4.
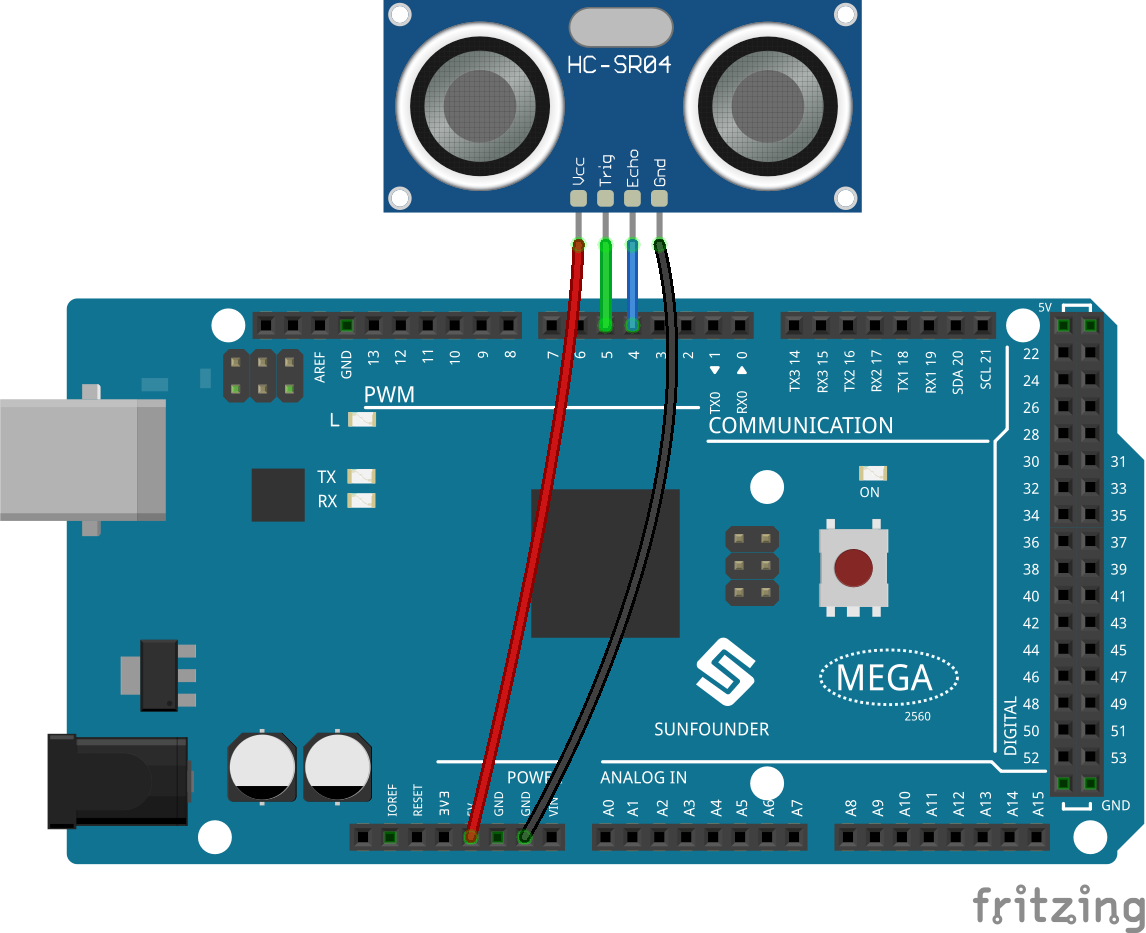
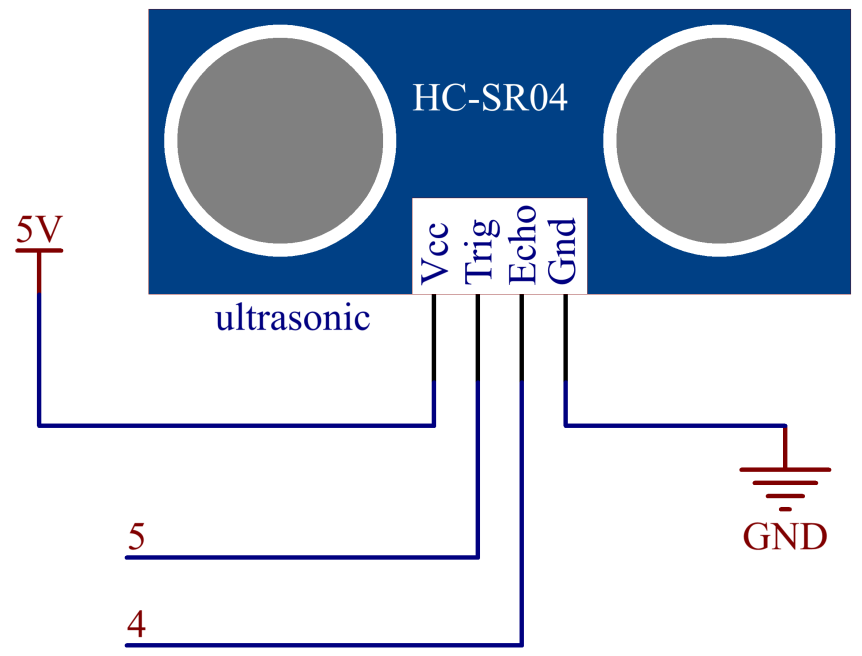
Diagrama esquemático
Código
Nota
Puedes abrir el archivo
2.33_ultrasonicModule.inoen la rutasunfounder_vincent_kit_for_arduino\code\2.33_ultrasonicModuledirectamente.O copia este código en el IDE de Arduino.
Después de cargar el código en la placa Mega2560, el monitor serial mostrará la distancia de los obstáculos detectados por el sensor ultrasónico.
Análisis del Código
En cuanto a la aplicación del sensor ultrasónico, podemos revisar directamente la subfunción.
float readSensorData(){// ...}
PING se activa mediante un pulso HIGH de 2 o más microsegundos. (Proporciona un pulso LOW corto antes para asegurar un pulso HIGH limpio.)
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
El pin de eco se usa para leer la señal de PING, un pulso HIGH cuya duración es el tiempo (en microsegundos) desde el envío del ping hasta la recepción del eco del objeto.
microsecond=pulseIn(echoPin, HIGH);
La velocidad del sonido es de 340 m/s o 29 microsegundos por centímetro.
Esto da la distancia recorrida por el ping, ida y vuelta, por lo que dividimos entre 2 para obtener la distancia del obstáculo.
float distance = microsecond / 29.00 / 2;
Imagen del Fenómeno