Nota
Hola, ¡bienvenido a la Comunidad de Entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Profundiza tus conocimientos sobre Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede anticipadamente a anuncios de nuevos productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones especiales de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.12 Servo
Resumen
En esta lección, aprenderás sobre el Servo. Un servo es un tipo de actuador de posición (angular) ajustable y mantenible, o un actuador rotativo que permite un control preciso de la posición angular. Actualmente, es ampliamente utilizado en juguetes de control remoto de alta gama, como aviones, submarinos, tele-robots, entre otros.
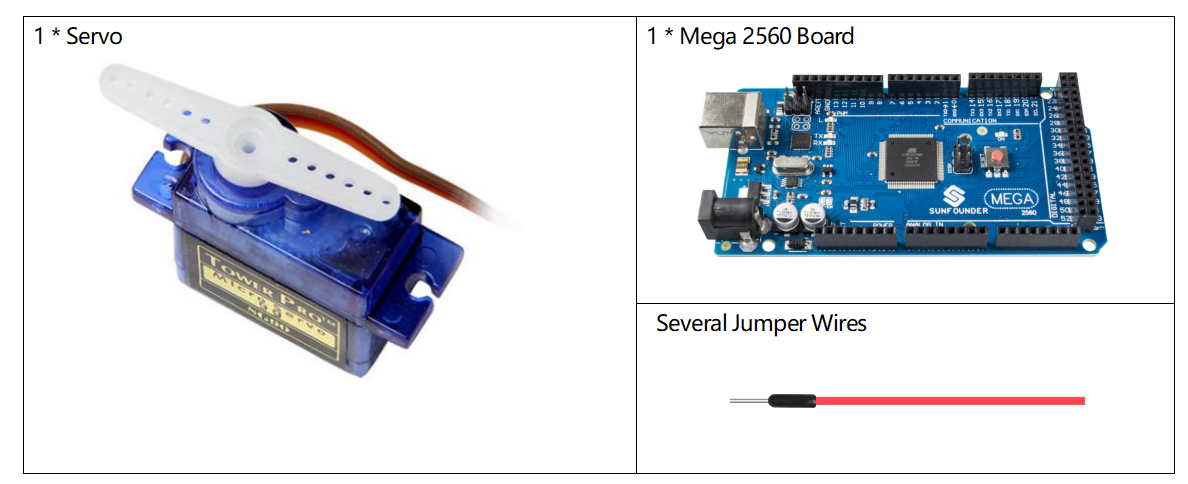
Componentes necesarios
Circuito Fritzing
En este ejemplo, usamos el pin PWM 9 para controlar el Servo. Conecta el cable naranja del servo al pin PWM 9, el cable rojo a 5V y el cable marrón a GND.
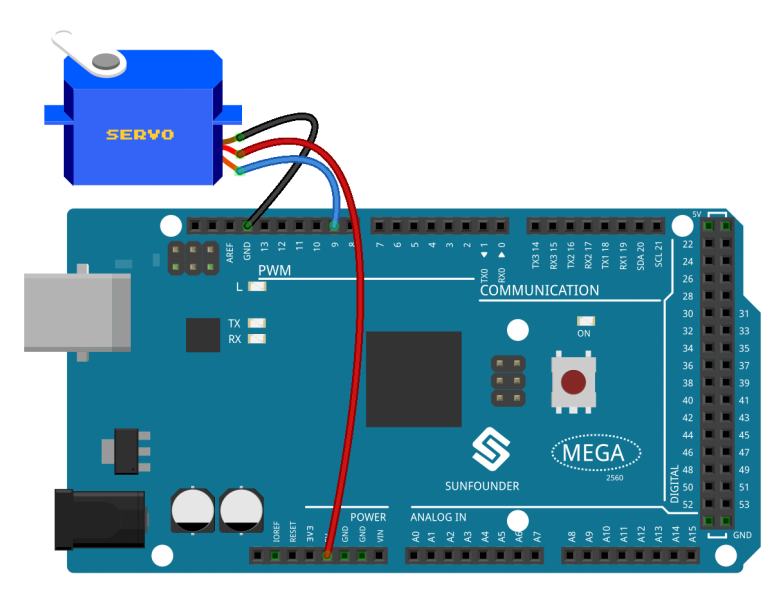
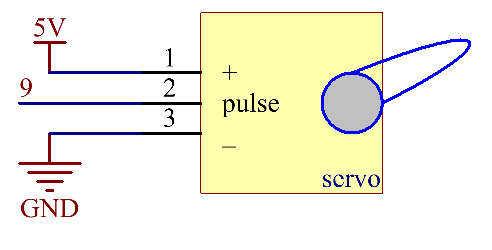
Diagrama esquemático
Código
Nota
Puedes abrir el archivo
2.12_servo.inoen la rutasunfounder_vincent_kit_for_arduino\code\2.12_servodirectamente.O copiar este código en el IDE de Arduino.
Al finalizar la carga del código en la placa Mega2560, podrás ver el brazo del servo girando en el rango de 0° a 180°.
Análisis del código
Usando la biblioteca Servo.h, puedes controlar fácilmente el servo.
#include <Servo.h>
Funciones de la biblioteca:
Servo
Crear un objeto Servo para controlar un servo.
uint8_t attach(int pin);
Convierte un pin en un controlador de servo. Llama a pinMode. Devuelve 0 en caso de fallo.
void detach();
Libera un pin del control de servo.
void write(int value);
Establece el ángulo del servo en grados, de 0 a 180.
int read();
Devuelve el valor establecido con la última llamada a write().
bool attached();
Devuelve 1 si el servo está actualmente conectado.
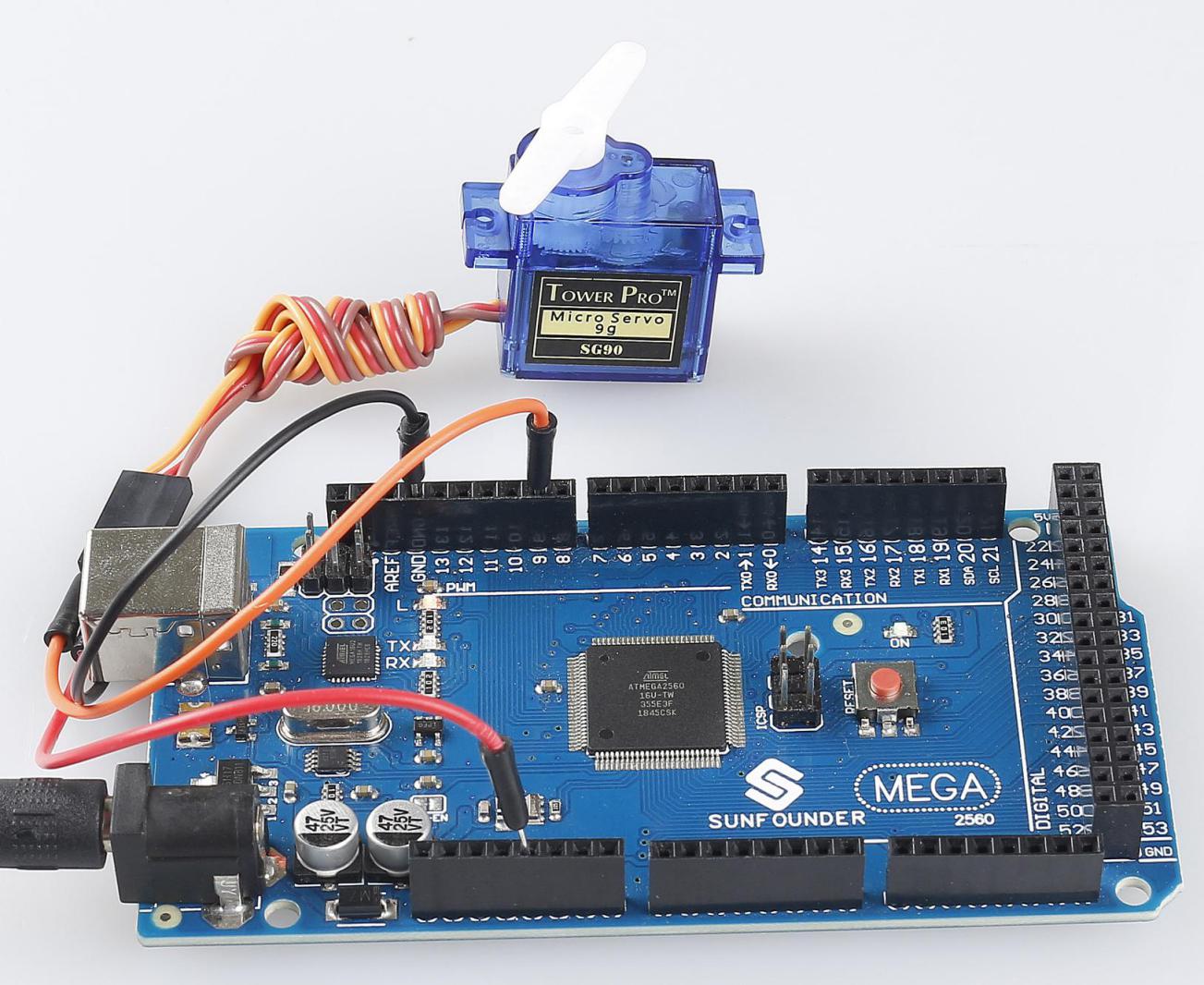
Imagen del fenómeno