Note
Bonjour et bienvenue dans la communauté des passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook, animée par SunFounder ! Explorez plus en profondeur l’univers de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et vos défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des conseils et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Bénéficiez d’un accès anticipé aux annonces de nouveaux produits et d’aperçus exclusifs.
Réductions spéciales : Profitez de réductions exclusives sur nos derniers produits.
Promotions festives et concours : Participez à des concours et des promotions pendant les fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
2.33 Module Ultrasonique
Aperçu
Dans cette leçon, vous apprendrez à utiliser un module ultrasonique.
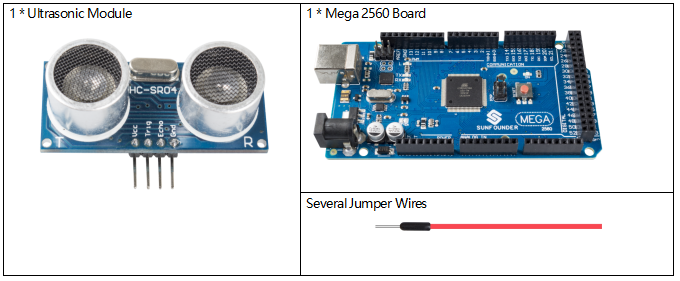
Composants requis
Circuit Fritzing
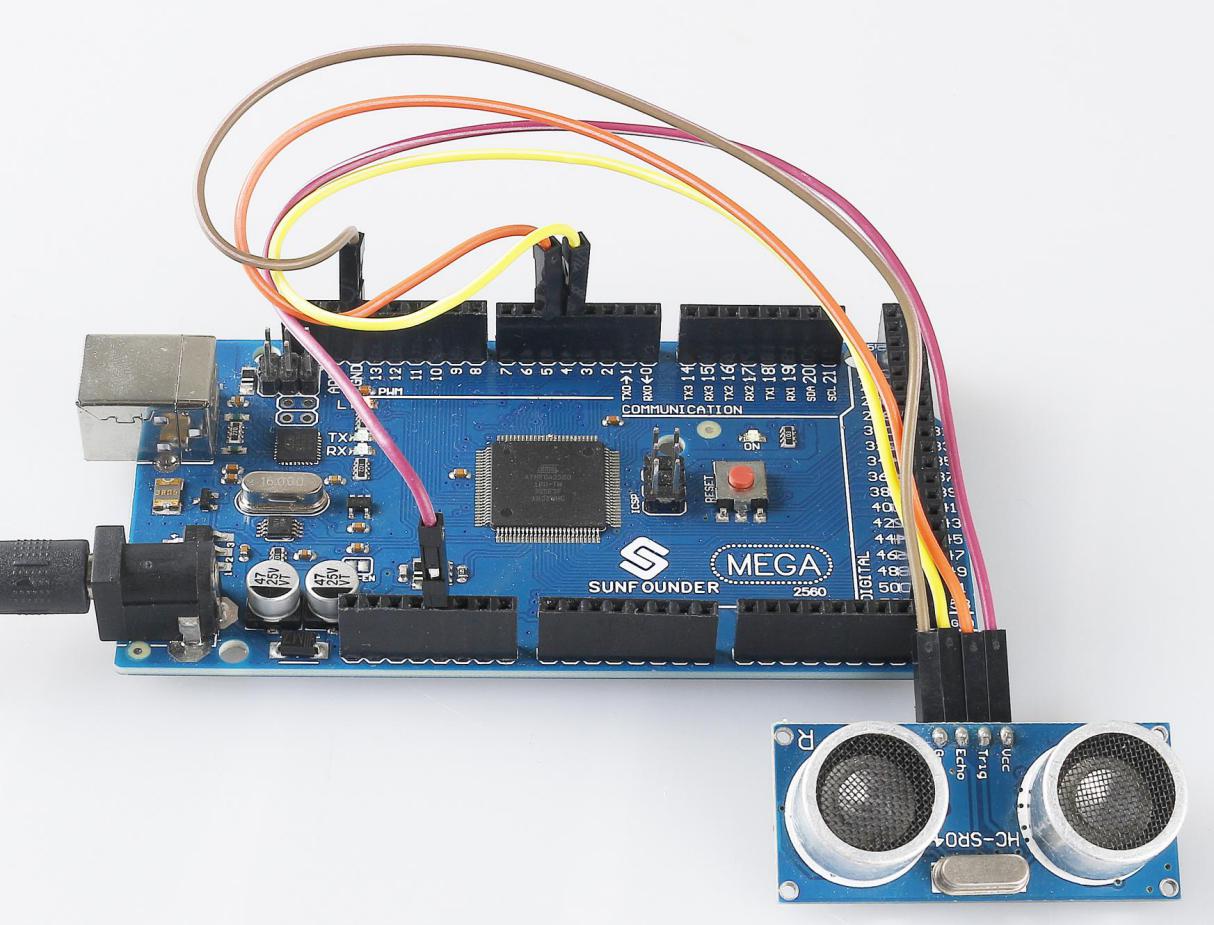
Dans cet exemple, nous connectons directement les broches du module ultrasonique aux broches de la carte Mega 2560. Ensuite, nous connectons la broche VCC du module ultrasonique à 5V, GND à GND, Trig à la broche numérique 5 et Echo à la broche numérique 4.
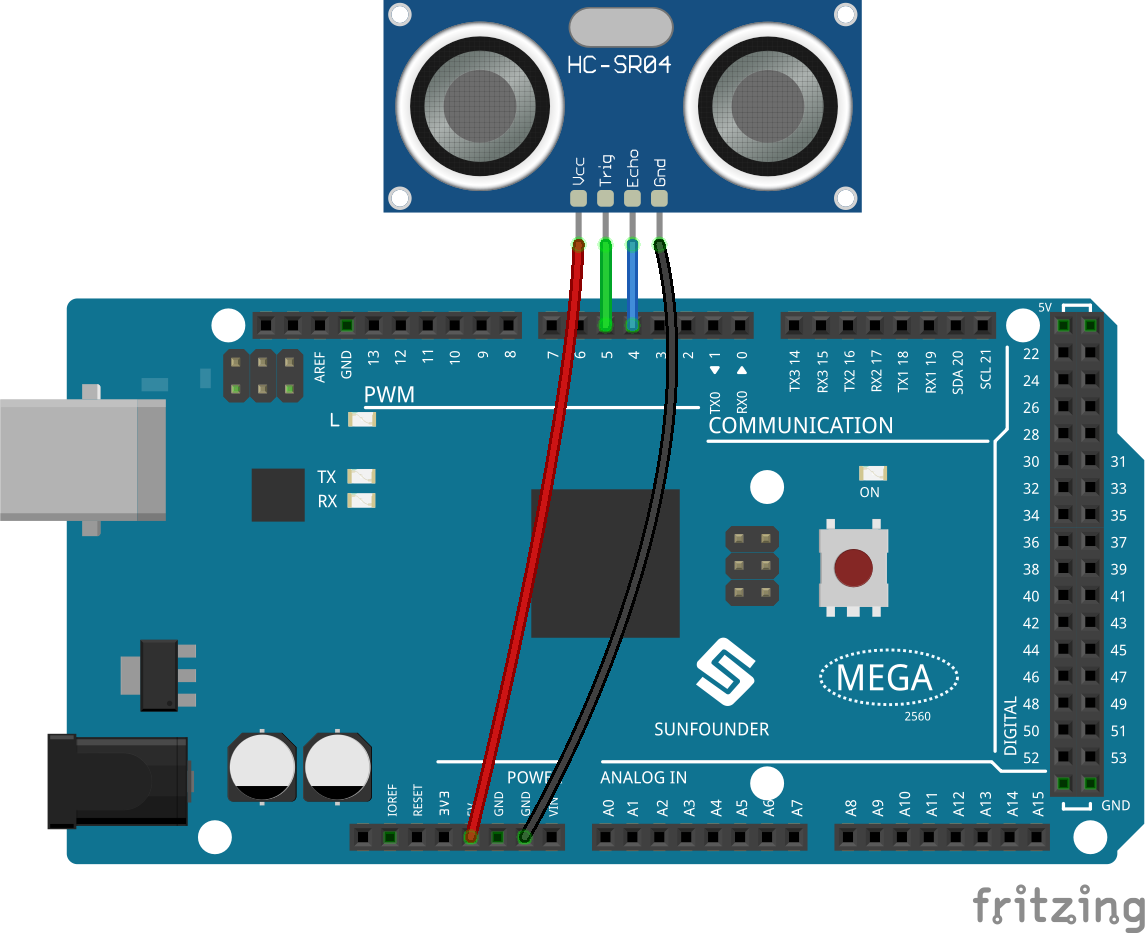
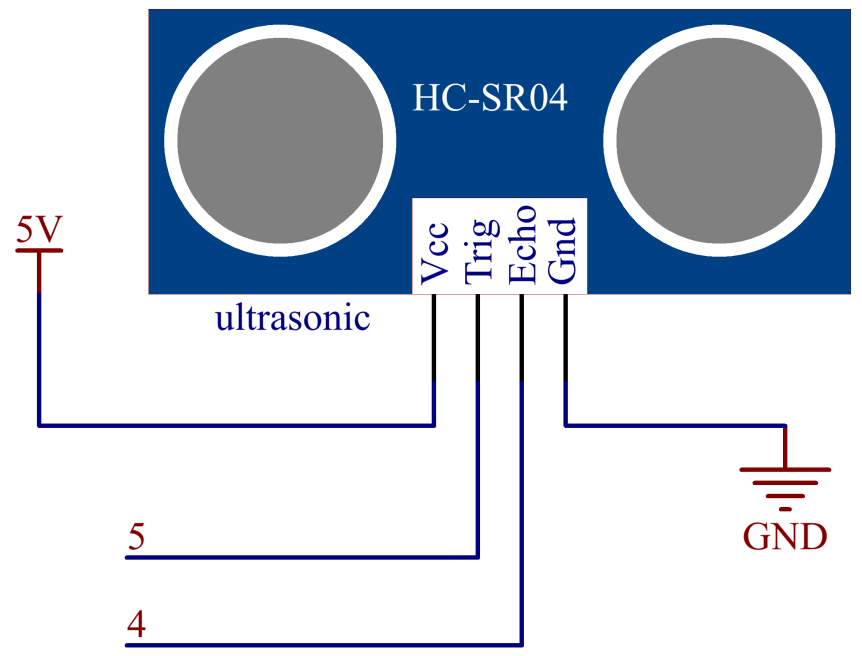
Schéma de câblage
Code
Note
Vous pouvez ouvrir directement le fichier
2.33_ultrasonicModule.inositué dans le dossiersunfounder_vincent_kit_for_arduino\code\2.33_ultrasonicModule.Ou copiez ce code dans l’IDE Arduino.
Une fois le code téléchargé sur la carte Mega2560, le moniteur série affichera la distance des obstacles détectés par le capteur ultrasonique.
Analyse du code
Concernant l’application du capteur ultrasonique, nous pouvons directement vérifier la sous-fonction suivante.
float readSensorData(){// ...}
Le PING est déclenché par une impulsion HIGH de 2 microsecondes ou plus. (Donner une courte impulsion LOW au préalable pour garantir une impulsion HIGH propre.)
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
La broche echo est utilisée pour lire le signal de PING, une impulsion HIGH dont la durée est le temps (en microsecondes) qui s’écoule entre l’envoi du ping et la réception de l’écho de l’objet.
microsecond=pulseIn(echoPin, HIGH);
La vitesse du son est de 340 m/s, soit 29 microsecondes par centimètre.
Cela donne la distance parcourue par le ping, aller-retour, nous divisons donc par 2 pour obtenir la distance réelle de l’obstacle.
float distance = microsecond / 29.00 / 2;
Illustration du phénomène