Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Lektion 21: Time of Flight Micro-LIDAR Distanzsensor (VL53L0X)
In dieser Lektion lernen Sie, wie Sie den VL53L0X Time of Flight Distanzsensor mit einem Arduino Uno verwenden. Wir werden die Grundlagen des Anschlusses des Sensors behandeln, um Entfernungen in Millimetern zu messen und die Messwerte auf dem seriellen Monitor anzuzeigen. Dieses Projekt bietet praktische Erfahrungen mit fortschrittlichen Sensoren und deren Anwendungen in der realen Welt, wodurch Ihre Arduino-Fähigkeiten verbessert werden.
Benötigte Komponenten
In diesem Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein komplettes Kit zu kaufen. Hier ist der Link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Universal Maker Sensor Kit |
94 |
Sie können sie auch separat über die folgenden Links kaufen.
Component Introduction |
Purchase Link |
|---|---|
Arduino UNO R3 or R4 |
|
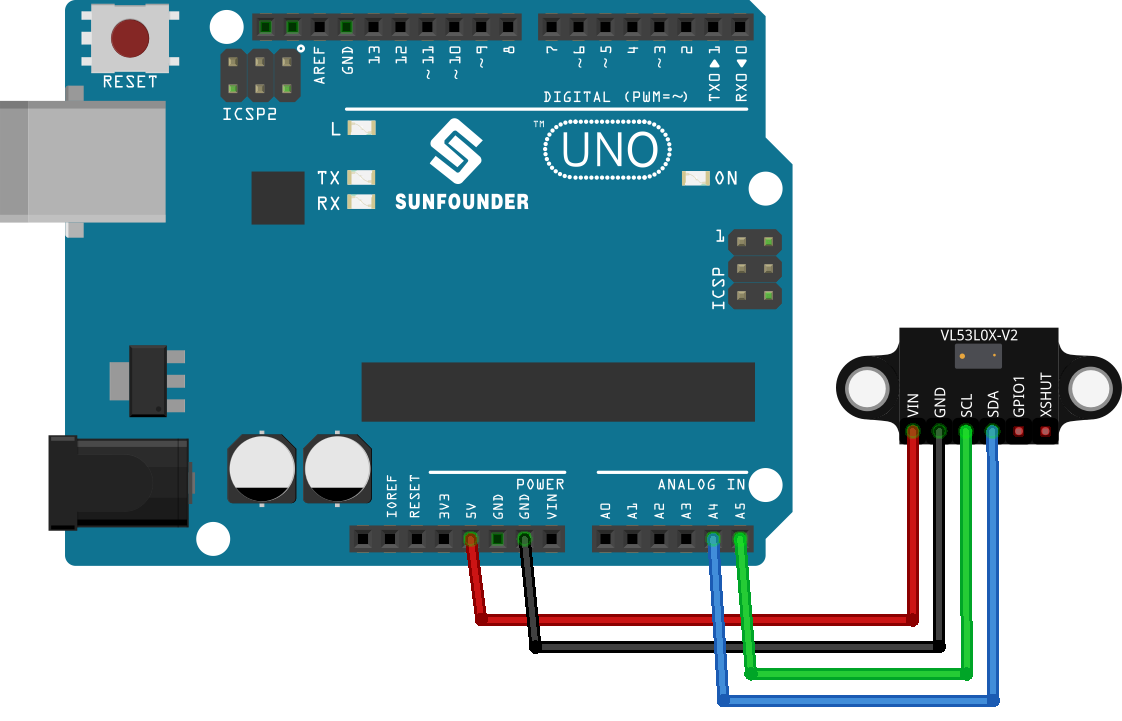
Verkabelung
Code
Bemerkung
Um die Bibliothek zu installieren, verwenden Sie den Arduino Library Manager und suchen nach „Adafruit_VL53L0X“ und installieren diese.
Code-Analyse
Einbinden der notwendigen Bibliothek und Initialisierung des Sensors. Wir beginnen mit dem Einbinden der Bibliothek für den VL53L0X-Sensor und erstellen eine Instanz der Adafruit_VL53L0X-Klasse.
Bemerkung
Um die Bibliothek zu installieren, verwenden Sie den Arduino Library Manager und suchen nach „Adafruit_VL53L0X“ und installieren diese.
#include <Adafruit_VL53L0X.h> Adafruit_VL53L0X lox = Adafruit_VL53L0X();
Initialisierung in der
setup()-Funktion. Hier richten wir die serielle Kommunikation ein und initialisieren den Entfernungssensor. Wenn der Sensor nicht initialisiert werden kann, stoppt das Programm.void setup() { Serial.begin(115200); while (!Serial) { delay(1); } Serial.println("Adafruit VL53L0X test"); if (!lox.begin()) { Serial.println(F("Failed to boot VL53L0X")); while (1) ; } Serial.println(F("VL53L0X API Simple Ranging example\n\n")); }
Erfassen und Anzeigen der Messungen in der
loop()-Funktion. Der Arduino erfasst kontinuierlich eine Entfernungsmessung mit der MethoderangingTest(). Wenn die Messung gültig ist, wird sie auf dem seriellen Monitor angezeigt.void loop() { VL53L0X_RangingMeasurementData_t measure; Serial.print("Reading a measurement... "); lox.rangingTest(&measure, false); if (measure.RangeStatus != 4) { Serial.print("Distance (mm): "); Serial.println(measure.RangeMilliMeter); } else { Serial.println(" out of range "); } delay(100); }