Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
4.7 Smarter Ventilator
Einführung
In diesem Projekt bauen Sie einen „smarten Ventilator“, der sowohl im manuellen als auch im automatischen Modus betrieben werden kann. Durch die Kombination von Motor, Tastern und einem Thermistor kann der Ventilator verschiedene Geschwindigkeiten einstellen und auf Temperaturänderungen reagieren. Dieses Experiment eignet sich hervorragend, um Motorsteuerung, Temperaturmessung und die Nutzung von GPIO kennenzulernen.
Was Sie benötigen
Für dieses Projekt benötigen Sie die folgenden Komponenten:
KOMPONENTENBESCHREIBUNG |
KAUFLINK |
|---|---|
- |
|
Raspberry Pi |
- |
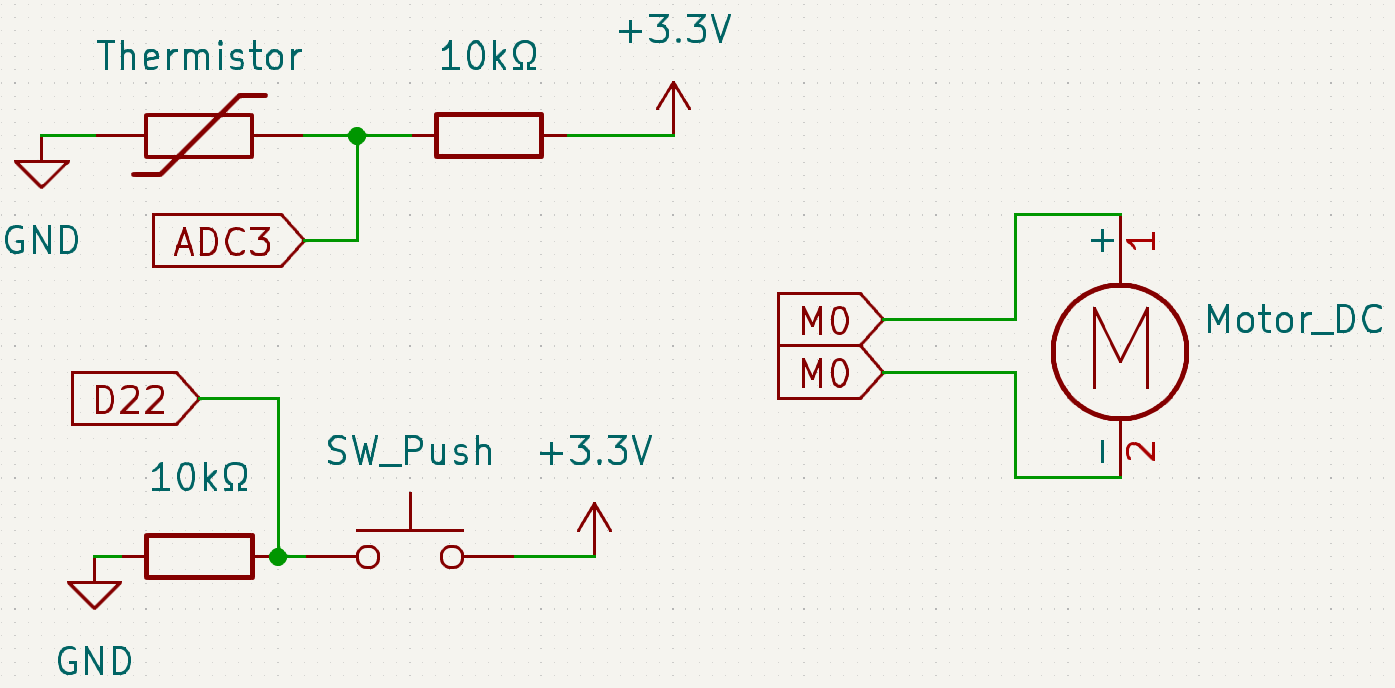
Schaltplan
Das folgende Schaltbild zeigt, wie der Thermistor, der Taster, der Motortreiber und der Motor verbunden werden:
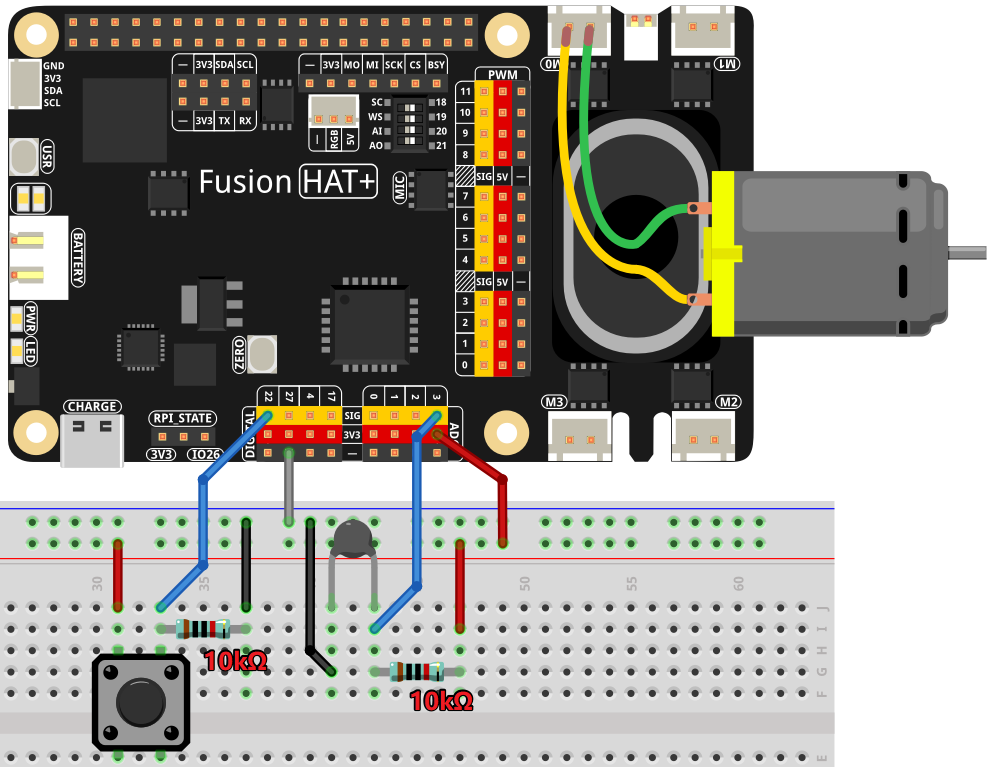
Verdrahtungsdiagramm
Die folgende Abbildung zeigt das Breadboard-Layout und die Verdrahtung:
Beispiel ausführen
Der gesamte in diesem Tutorial verwendete Beispielcode befindet sich im Verzeichnis ai-lab-kit.
Führen Sie die folgenden Schritte aus, um das Beispiel auszuführen:
cd ~/ai-lab-kit/python/
sudo python3 4.7_SmartFan.py
Code
Nachfolgend ist das Python-Skript für dieses Projekt aufgeführt:
#!/usr/bin/env python3
from fusion_hat.motor import Motor
from fusion_hat.pin import Pin, Mode, Pull
from fusion_hat.adc import ADC
from time import sleep, time
import math
BtnPin = Pin(22, mode=Mode.IN, pull=Pull.DOWN)
motor = Motor("M0")
thermistor = ADC("A3")
level = 0
currentTemp = None
markTemp = None
PRINT_INTERVAL = 1.0
_last_print = 0.0
button_event = False # flag: button was pressed
def temperature(samples=5, delay=0.01):
"""Read thermistor multiple times and return averaged Celsius (float) or None."""
vals = []
for _ in range(samples):
analogVal = thermistor.read()
Vr = 3.3 * float(analogVal) / 4095.0
if (3.3 - Vr) <= 0.1:
return None
Rt = 10000.0 * Vr / (3.3 - Vr)
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
vals.append(tempK - 273.15)
sleep(delay)
return sum(vals) / len(vals)
def motor_run(lv):
lv = max(0, min(4, lv))
motor.power(0 if lv == 0 else lv * 25)
return lv
def changeLevel():
"""Button press: cycle level 0~4 and set a flag for main loop to print."""
global level, button_event
level = (level + 1) % 5
button_event = True
BtnPin.when_activated = changeLevel
def main():
global level, currentTemp, markTemp, _last_print, button_event
markTemp = temperature()
while True:
currentTemp = temperature()
if currentTemp is None:
print("Sensor read failed. Please check the sensor.")
sleep(0.5)
continue
# Handle button event in main loop (stable timing)
if button_event:
button_event = False
markTemp = currentTemp
print(f"[Button] Level -> {level} | Temp: {currentTemp:.2f} °C | Mark: {markTemp:.2f} °C")
# Periodic temperature print
now = time()
if now - _last_print >= PRINT_INTERVAL:
if markTemp is None:
markTemp = currentTemp
print(f"Temp: {currentTemp:.2f} °C | Mark: {markTemp:.2f} °C | Level: {level}")
_last_print = now
# Auto adjust level based on ±5°C
if markTemp is None:
markTemp = currentTemp
if level != 0:
diff = currentTemp - markTemp
if diff <= -5:
level = max(0, level - 1)
markTemp = currentTemp
print(f"[Auto] Temp down -> Level {level} (Temp: {currentTemp:.2f} °C)")
elif diff >= 5:
level = min(4, level + 1)
markTemp = currentTemp
print(f"[Auto] Temp up -> Level {level} (Temp: {currentTemp:.2f} °C)")
level = motor_run(level)
sleep(0.5)
try:
main()
except KeyboardInterrupt:
print("\nExiting...")
finally:
motor.stop()
sleep(0.1)
Dieses Python-Skript kombiniert einen Motor, einen Taster und einen Temperatursensor zu einem temperaturgesteuerten Ventilatorsystem mit einstellbarer Geschwindigkeit. Bei der Ausführung:
Temperaturmessung: Liest die aktuelle Temperatur in Celsius mithilfe des Thermistors.
Manuelle Geschwindigkeitsanpassung:
Ein Taster, der mit GPIO 22 verbunden ist, ermöglicht es dem Benutzer, zwischen fünf Geschwindigkeitsstufen (0 bis 4) zu wechseln.
Jeder Tastendruck erhöht die Geschwindigkeitsstufe, und der Motor läuft mit der entsprechenden Geschwindigkeit. Stufe 0 stoppt den Motor.
Automatische Geschwindigkeitsregelung: Das System passt die Motorgeschwindigkeit automatisch an Temperaturänderungen an:
Wenn die Temperatur um 2°C oder mehr steigt, erhöht sich die Geschwindigkeitsstufe (bis maximal Stufe 4).
Wenn die Temperatur um 2°C oder mehr sinkt, verringert sich die Geschwindigkeitsstufe (bis minimal Stufe 0).
Kontinuierliche Überwachung: Das System überwacht kontinuierlich die Temperatur und passt die Ventilatorgeschwindigkeit entsprechend an.
Sauberes Beenden: Bei
Ctrl+Cwird der Motor gestoppt, und das Skript wird ordnungsgemäß beendet.
Code verstehen
Temperaturberechnung:
def temperature(samples=5, delay=0.01): """Read thermistor multiple times and return averaged Celsius (float) or None.""" vals = [] for _ in range(samples): analogVal = thermistor.read() Vr = 3.3 * float(analogVal) / 4095.0 if (3.3 - Vr) <= 0.1: return None Rt = 10000.0 * Vr / (3.3 - Vr) tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) vals.append(tempK - 273.15) sleep(delay) return sum(vals) / len(vals)
Die Funktion
temperature()liest mehrfach den analogen Wert des Thermistors, wandelt ihn in einen Widerstandswert um und berechnet anschließend mithilfe einer mathematischen Formel die entsprechende Temperatur.Motor-Geschwindigkeitssteuerung:
def motor_run(lv): lv = max(0, min(4, lv)) motor.power(0 if lv == 0 else lv * 25) return lv
Die Funktion
motor_run()passt die Motorgeschwindigkeit anhand der Variablenlevelan. Die Geschwindigkeit wird dabei auf einen Wert zwischen 0 und 1 normiert.Manuelle Geschwindigkeitsanpassung:
def changeLevel(): """Button press: cycle level 0~4 and set a flag for main loop to print.""" global level, button_event level = (level + 1) % 5 button_event = True BtnPin.when_activated = changeLevel
Die Funktion
changeLevel()wechselt bei jedem Tastendruck zyklisch zwischen den Geschwindigkeitsstufen 0 bis 4.Automatische Geschwindigkeitsanpassung:
def main(): global level, currentTemp, markTemp, _last_print, button_event markTemp = temperature() while True: currentTemp = temperature() if currentTemp is None: print("Sensor read failed. Please check the sensor.") sleep(0.5) continue ...
Die Funktion
main()überwacht kontinuierlich die Temperatur und passt die Ventilatorgeschwindigkeit an, wenn sich die Temperatur um mehr als 2°C vom Referenzwert unterscheidet.
Fehlerbehebung
Motor läuft nicht:
Ursache: Falsche Verdrahtung oder unzureichende Stromversorgung.
Lösung:
Überprüfen Sie, ob der Motor mit M0 verbunden ist.
Stellen Sie sicher, dass die Stromversorgung des Motors zu seiner erforderlichen Betriebsspannung passt.
Temperaturmessung ist ungenau:
Ursache: Defekter Thermistor.
Lösung:
Überprüfen Sie die Verdrahtung des Thermistors und stellen Sie sicher, dass er innerhalb des vorgesehenen Messbereichs arbeitet.
Tastendruck wird nicht erkannt:
Ursache: Falsche Verdrahtung oder falsche GPIO-Konfiguration.
Lösung:
Überprüfen Sie, ob der Taster mit GPIO 22 und GND verbunden ist.
Testen Sie den Taster separat, um sicherzustellen, dass er beim Drücken den Stromkreis schließt.
Geschwindigkeitsstufe ändert sich nicht automatisch:
Ursache: Fehler bei der Berechnung der Temperaturdifferenz.
Lösung: Stellen Sie sicher, dass die Werte
currentTempundmarkTempin der Funktionmain()korrekt aktualisiert werden.
Erweiterungsideen
Überhitzungswarnung: Fügen Sie einen Summer oder eine LED hinzu, um den Benutzer zu warnen, wenn die Temperatur einen kritischen Wert überschreitet.
if currentTemp > 50: buzzer.on()
Erweiterte Tasterfunktionen: Nutzen Sie langes Drücken des Tasters, um die Geschwindigkeitsstufe auf 0 zurückzusetzen oder zwischen automatischem und manuellem Modus umzuschalten.
Fazit
Das Projekt „Smarter Ventilator“ zeigt, wie sich manuelle und automatische Steuerung in einem einzigen System kombinieren lassen. Es ist ein praktisches Beispiel für die Integration von Sensoren, Motoren und Benutzerinteraktion in ein funktionales und effizientes System. Erweitern Sie das Projekt mit zusätzlichen Funktionen und erstellen Sie Ihre eigene intelligente Klimasteuerung!