Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
2.4 Neigungsschalter
Einführung
In diesem Projekt lernen wir das Neigungsschalter-Modul kennen. Dabei handelt es sich um einen Kugel-Neigungsschalter, der eine kleine Metallkugel im Inneren enthält. Dieser Schalter ist dafür ausgelegt, leichte Neigungen zu erkennen und kann in verschiedenen Anwendungen eingesetzt werden, z. B. zur Bewegungserkennung, Winkelmessung oder Überwachung der Balance.
Benötigte Komponenten
Für dieses Projekt benötigen Sie die folgenden Komponenten:
KOMPONENTENBESCHREIBUNG |
KAUFLINK |
|---|---|
- |
|
- |
|
Raspberry Pi |
- |
Schaltplan
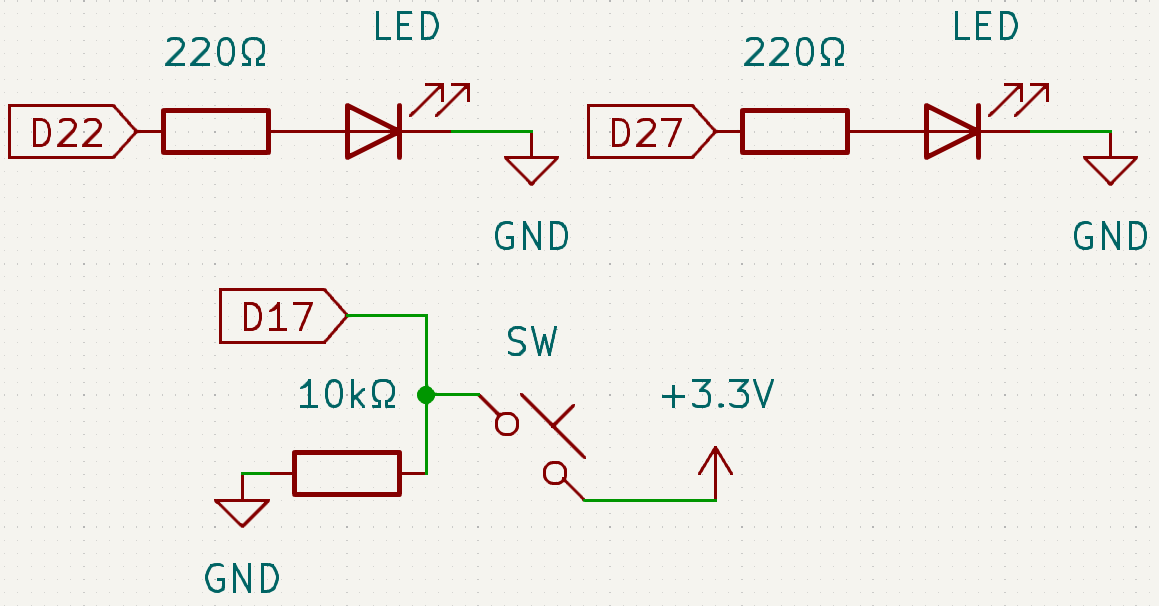
Die folgenden Diagramme zeigen, wie der Neigungsschalter angeschlossen wird:
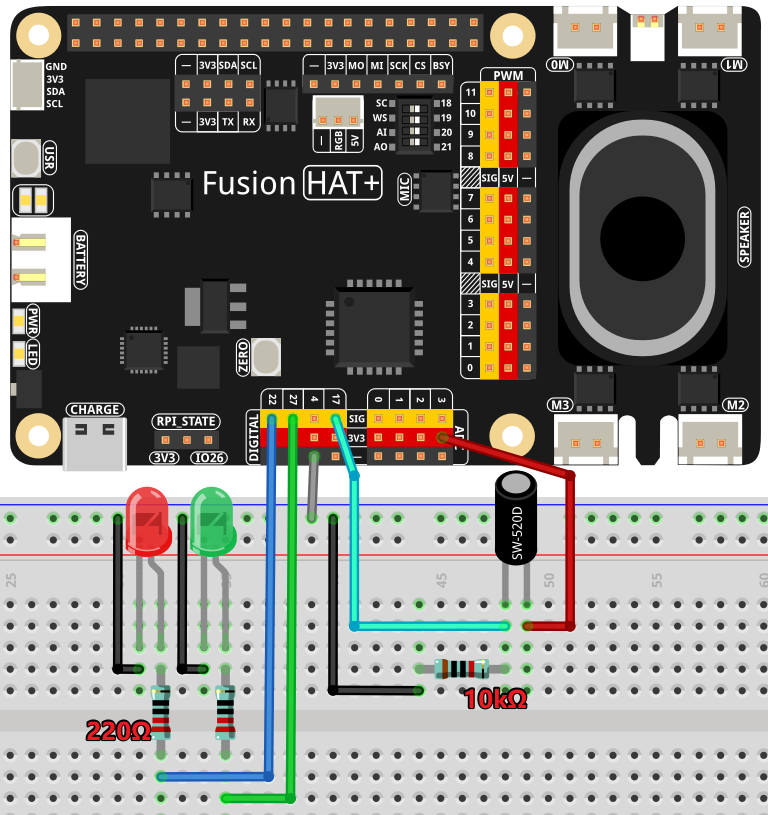
Verdrahtungsdiagramm
Folgen Sie diesen Schritten, um die Schaltung aufzubauen:
Verbinden Sie den Neigungsschalter mit GPIO-Pin 17 des Raspberry Pi.
Verbinden Sie die grüne LED über einen Widerstand mit GPIO-Pin 27.
Verbinden Sie die rote LED über einen Widerstand mit GPIO-Pin 22.
Schließen Sie die Kathoden beider LEDs an GND an.
Beispiel ausführen
Der gesamte Beispielcode, der in diesem Tutorial verwendet wird, befindet sich im Verzeichnis ai-lab-kit.
Folgen Sie diesen Schritten, um das Beispiel auszuführen:
cd ~/ai-lab-kit/python/
sudo python3 2.4_Tilt.py
Dieses Python-Skript verwendet einen Neigungssensor, um zwei LEDs zu steuern und Statusmeldungen in der Konsole anzuzeigen. Beim Ausführen passiert Folgendes:
Wenn der Neigungssensor (verbunden mit GPIO-Pin 17) eine Neigung erkennt:
Es wird eine Meldung in der Konsole ausgegeben.
Die rote LED (verbunden mit GPIO-Pin 22) wird eingeschaltet.
Die grüne LED (verbunden mit GPIO-Pin 27) wird ausgeschaltet.
Wenn der Neigungssensor aufrecht bleibt (in seiner normalen vertikalen Position):
Die rote LED wird ausgeschaltet.
Die grüne LED wird eingeschaltet.
Das Programm überwacht kontinuierlich den Zustand des Neigungssensors und passt den Zustand der LEDs entsprechend an.
Das Skript läuft unbegrenzt weiter, bis es durch Drücken von
Ctrl+Cbeendet wird.
Code
Unten sehen Sie das Python-Skript zur Steuerung des Neigungsschalters und der LEDs:
#!/usr/bin/env python3
from fusion_hat.pin import Pin, Mode, Pull
from signal import pause # Import pause function from signal module
TiltPin = Pin(17, mode=Mode.IN, pull=Pull.DOWN) # Tilt sensor connected to GPIO pin 17
green_led = Pin(27,mode=Mode.OUT) # Green LED connected to GPIO pin 27
red_led = Pin(22,mode=Mode.OUT) # Red LED connected to GPIO pin 22
def detect():
"""
Detect the tilt sensor state and control the LEDs.
Turns on the red LED and turns off the green LED when tilted.
Turns off the red LED and turns on the green LED when not tilted.
"""
if TiltPin.value() == 0: # Check if the sensor is tilted
print(' *************')
print(' * Tilt! *')
print(' *************')
red_led.high() # Turn on red LED
green_led.low() # Turn off green LED
else: # If the sensor is not tilted
red_led.low() # Turn off red LED
green_led.high() # Turn on green LED
try:
# Set up a callback to detect changes in the tilt sensor state
TiltPin.when_activated = detect
TiltPin.when_deactivated = detect
pause()
except KeyboardInterrupt:
# Handle KeyboardInterrupt (Ctrl+C) to exit the loop gracefully
pass
Code verstehen
Importe
Das Skript importiert die notwendigen Klassen zur Steuerung von LEDs und Eingängen und initialisiert sie mit den entsprechenden GPIO-Pins.
from fusion_hat.pin import Pin, Mode, Pull from signal import pause # Importiert die Funktion pause aus dem signal-Modul
Initialisierung
Konfigurieren Sie den Neigungsschalter sowie die LEDs, die mit den GPIO-Pins 17, 27 und 22 verbunden sind.
TiltPin = Pin(17, mode=Mode.IN, pull=Pull.DOWN) # Neigungssensor an GPIO-Pin 17 green_led = Pin(27,mode=Mode.OUT) # Grüne LED an GPIO-Pin 27 red_led = Pin(22,mode=Mode.OUT) # Rote LED an GPIO-Pin 22
Detect-Funktion
Die Funktion
detectüberprüft den Zustand des Neigungsschalters und aktualisiert entsprechend die LEDs. Wenn der Schalter geneigt ist, leuchtet die rote LED und die grüne LED wird ausgeschaltet.def detect(): if TiltPin.value() == 0: # Prüfen, ob der Sensor geneigt ist print(' *************') print(' * Tilt! *') print(' *************') red_led.high() # Rote LED einschalten green_led.low() # Grüne LED ausschalten else: # Wenn der Sensor nicht geneigt ist red_led.low() # Rote LED ausschalten green_led.high() # Grüne LED einschalten
Hauptschleife
Die Funktion
detectwird den Ereignissenwhen_pressedundwhen_releaseddes Neigungssensors zugewiesen. Das Programm läuft weiter, bis es unterbrochen wird.try: # Callback-Funktion zur Erkennung von Änderungen des Sensors TiltPin.when_activated = detect TiltPin.when_deactivated = detect pause() except KeyboardInterrupt: # KeyboardInterrupt (Ctrl+C) abfangen und das Programm sauber beenden pass
Fehlerbehebung
Skript reagiert nicht auf Neigung
Ursache: Die Ereignis-Listener (
when_activatedundwhen_deactivated) funktionieren möglicherweise nicht korrekt.Lösung: Prüfen Sie, ob
detect()korrekt mit den Ereignissenwhen_activatedundwhen_deactivatedverbunden ist.
LEDs flackern
Ursache: Sensorsignalrauschen oder Entprellprobleme.
Lösung: Fügen Sie eine kurze Verzögerung hinzu, um das Signal zu stabilisieren:
from time import sleep def detect(): sleep(0.05) # Entprell-Verzögerung if TiltPin.value() == 0: red_led.on() green_led.off() else: red_led.off() green_led.on()
Erweiterungsideen
Akustisches Feedback
Fügen Sie einen Buzzer hinzu, der ein akustisches Signal ausgibt, wenn der Neigungssensor ausgelöst wird:
from fusion_hat import Buzzer,Pin buzzer = Buzzer(Pin(4)) if TiltPin.value() == 0: buzzer.on() else: buzzer.off()
Zeitbasierte Warnungen
Lösen Sie eine Warnung aus, wenn der Sensor für eine bestimmte Zeit geneigt bleibt:
from threading import Timer def alert(): print("Tilt detected for too long!") red_led.on() sleep(0.5) red_led.off() if TiltPin.value() == 0: Timer(5, alert).start() # Warnung auslösen, wenn 5 Sekunden geneigt
Fazit
Dieses Projekt zeigt, wie ein Neigungsschalter mit dem Fusion HAT+ verwendet werden kann, um Neigungen zu erkennen und LEDs zu steuern. Neigungsschalter sind eine kostengünstige Lösung für einfache Bewegungs- und Winkelerkennung und finden praktische Anwendungen in der Robotik und in Smart-Home-Systemen.