Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
4.14 Gravitationswürfel
Einführung
In dieser Lektion bauen Sie einen gravitationsreferenzierten 3D-Würfel, der auf einem 128×64-SSD1306-OLED angezeigt und von einer IMU gesteuert wird. Der Würfel neigt sich entsprechend der Orientierung der Platine relativ zur Schwerkraft, wobei nur Roll- und Nickwinkel aus dem Beschleunigungssensor verwendet werden.
Wichtige Merkmale:
Orthografische 3D-Würfeldarstellung (keine perspektivische Verzerrung)
Orientierung, die aus dem Beschleunigungssensor relativ zu einer anfänglichen Referenzlage abgeleitet wird
Eine Würfelfläche ist ausgefüllt, damit die Vorder-/Rückseitenorientierung leicht erkennbar ist
Zwei Konfigurationsflags ermöglichen das Umkehren der X-/Y-Richtung, damit die Anzeige zu Ihrer physischen Montage passt
Wenn Sie die Platine neigen, dreht sich der Würfel flüssig und bietet eine intuitive Visualisierung der Geräteausrichtung.
Was Sie benötigen
Für dieses Projekt werden die folgenden Komponenten benötigt:
KOMPONENTENBESCHREIBUNG |
KAUFLINK |
|---|---|
- |
|
- |
|
- |
|
Raspberry Pi |
- |
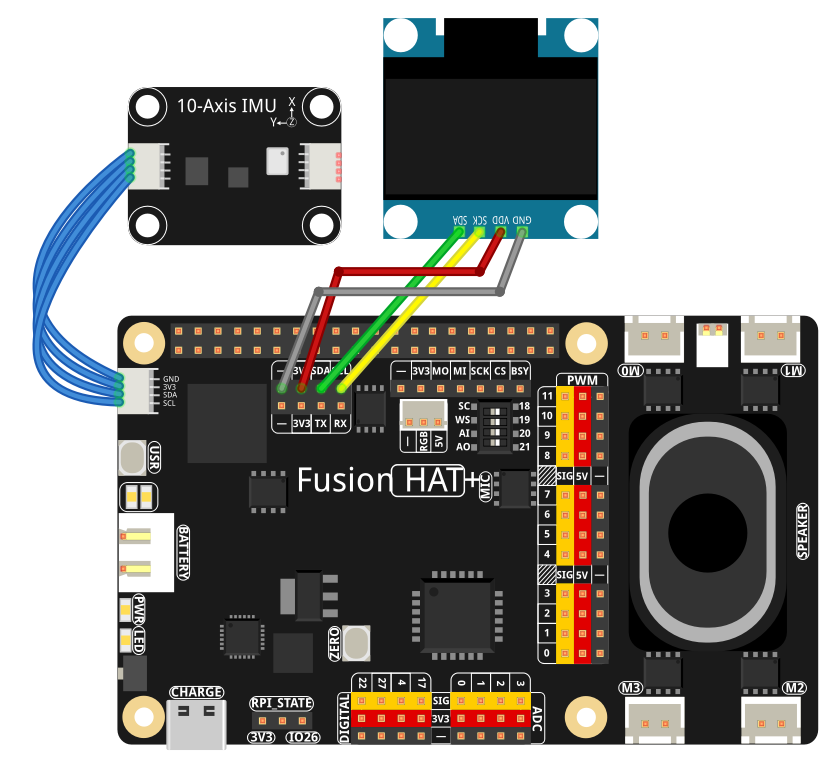
Verdrahtungsdiagramm
Verwenden Sie das folgende Verdrahtungsdiagramm, um die Komponenten korrekt zu verbinden:
Einrichtungsschritte
Installieren Sie die OLED-Bibliotheken:
sudo pip3 install adafruit-circuitpython-ssd1306 --break
Installieren Sie die IMU-Bibliotheken:
sudo pip install git+https://github.com/sunfounder/sunfounder-imu-python.git --break-system-packages
Führen Sie das Beispiel aus dem Verzeichnis
ai-lab-kitaus:cd ~/ai-lab-kit/python/ sudo python3 4.14_Cube.py
Wenn das Skript ausgeführt wird:
Der Beschleunigungssensor liefert auf die Schwerkraft bezogene X/Y/Z-Daten.
Der Code berechnet Roll- und Nickwinkel relativ zu einer anfänglichen Referenzlage (die aktuelle Orientierung wird zu 0°, 0°).
Ein Drahtgitterwürfel mit einer ausgefüllten Vorderseite wird auf dem OLED dargestellt.
Durch Neigen der Platine wird der Würfel auf dem Bildschirm gedreht.
Drücken Sie Ctrl+C, um das Programm zu beenden; das OLED wird gelöscht.
Code
Hier ist das Python-Skript für den gravitationsreferenzierten Würfel:
import time
import math
from PIL import Image, ImageDraw, ImageFont
import adafruit_ssd1306
import board
from sunfounder_imu import IMU
# ========== User-configurable axis flip ==========
# Flip X/Y to match your physical mounting and perceived motion on the OLED.
# If motion looks reversed on a given axis, set that axis to True.
FLIP_X = False # True = invert roll direction on display; False = normal
FLIP_Y = False # True = invert pitch direction on display; False = normal
# ========== OLED setup ==========
WIDTH, HEIGHT = 128, 64
i2c = board.I2C()
oled = adafruit_ssd1306.SSD1306_I2C(WIDTH, HEIGHT, i2c, addr=0x3C)
oled.fill(0)
oled.show()
# Framebuffer
image = Image.new("1", (WIDTH, HEIGHT))
draw = ImageDraw.Draw(image)
font = ImageFont.load_default()
# ========== IMU initialization ==========
imu = IMU()
# ========== Cube model ==========
CUBE_SIZE = 9 # smaller cube for 128x64 OLED
VERTS = [
(-1, -1, -1), (+1, -1, -1), (+1, +1, -1), (-1, +1, -1),
(-1, -1, +1), (+1, -1, +1), (+1, +1, +1), (-1, +1, +1),
]
EDGES = [
(0,1),(1,2),(2,3),(3,0),
(4,5),(5,6),(6,7),(7,4),
(0,4),(1,5),(2,6),(3,7)
]
FRONT_FACE = [4,5,6,7] # +Z face gets filled
# ========== Projection (orthographic) ==========
def project_point(p, scale=CUBE_SIZE, cx=WIDTH//2, cy=HEIGHT//2):
"""
Orthographic projection. We flip the screen Y here so that positive 3D Y
appears upward on the OLED (more intuitive for tilt).
"""
x, y, _z = p
return int(cx + scale * x), int(cy - scale * y)
# ========== Math / orientation helpers ==========
def ema(prev, new, alpha):
"""Exponential smoothing to reduce jitter."""
return alpha * new + (1.0 - alpha) * prev
def rotate_point(p, roll, pitch, yaw=0.0):
"""Rotate p=(x,y,z) by Rx(roll)*Ry(pitch)*Rz(yaw). Yaw fixed to 0 for gravity-only."""
x, y, z = p
# Rx
cr, sr = math.cos(roll), math.sin(roll)
y, z = (y*cr - z*sr), (y*sr + z*cr)
# Ry
cp, sp = math.cos(pitch), math.sin(pitch)
x, z = (x*cp + z*sp), (-x*sp + z*cp)
# Rz (kept for completeness)
if yaw:
cz, sz = math.cos(yaw), math.sin(yaw)
x, y = (x*cz - y*sz), (x*sz + y*cz)
return (x, y, z)
def accel_to_rp(ax, ay, az):
"""
Convert accelerometer (m/s²) to roll/pitch in radians (gravity-referenced).
roll = rotation around X (right-hand rule)
pitch = rotation around Y
"""
# Convert from m/s² to g (9.80665 m/s² = 1g)
ax_g = ax / 9.80665
ay_g = ay / 9.80665
az_g = az / 9.80665
g = math.sqrt(ax_g*ax_g + ay_g*ay_g + az_g*az_g) + 1e-9
axn, ayn, azn = ax_g / g, ay_g / g, az_g / g
roll = math.atan2(ayn, azn)
pitch = math.atan2(-axn, math.sqrt(ayn*ayn + azn*azn))
return roll, pitch
def draw_cube(roll, pitch, yaw=0.0, annotate=True):
"""Render the cube with one filled face."""
draw.rectangle((0, 0, WIDTH, HEIGHT), outline=0, fill=0)
rverts = [rotate_point(v, roll, pitch, yaw) for v in VERTS]
pts = [project_point(v) for v in rverts]
# Filled front face
face_xy = [pts[i] for i in FRONT_FACE]
draw.polygon(face_xy, outline=255, fill=255)
# Wireframe edges
for a, b in EDGES:
x0, y0 = pts[a]
x1, y1 = pts[b]
draw.line((x0, y0, x1, y1), fill=255)
if annotate:
rdeg = math.degrees(roll)
pdeg = math.degrees(pitch)
draw.text((2, 2), f"R:{rdeg:+.0f} P:{pdeg:+.0f}", font=font, fill=255)
# ========== Baseline & smoothing ==========
baseline_set = False
roll0 = pitch0 = 0.0
ROLL_EMA = 0.20
PITCH_EMA = 0.20
roll_disp = pitch_disp = 0.0
try:
while True:
# Read IMU data
data = imu.read()
# Extract accelerometer data (in m/s²)
ax = data['accel_x']
ay = data['accel_y']
az = data['accel_z']
# Absolute roll/pitch from gravity
roll_abs, pitch_abs = accel_to_rp(ax, ay, az)
# First reading defines baseline (0°,0°)
if not baseline_set:
roll0, pitch0 = roll_abs, pitch_abs
baseline_set = True
# Relative orientation
roll_rel = roll_abs - roll0
pitch_rel = pitch_abs - pitch0
# Apply user flips to match perceived direction on OLED
if FLIP_X:
roll_rel = -roll_rel
if FLIP_Y:
pitch_rel = -pitch_rel
# Smooth
roll_disp = ema(roll_disp, roll_rel, ROLL_EMA)
pitch_disp = ema(pitch_disp, pitch_rel, PITCH_EMA)
# Render (yaw fixed to 0 in gravity-only mode)
draw_cube(roll_disp, pitch_disp, yaw=0.0, annotate=True)
# Show on OLED
oled.image(image)
oled.show()
time.sleep(0.02)
except KeyboardInterrupt:
oled.fill(0)
oled.show()
print("\nExited.")
Code verstehen
IMU-Initialisierung
Das Skript erstellt eine
IMU-Instanz aus dem Fusion-HAT+-Modul. Der Beschleunigungssensor liefert rohe Beschleunigungswerte für X, Y und Z in der Einheit m/s².Schwerkraftbezogene Winkel
accel_to_rp()wandelt die Beschleunigungsmesswerte in Roll- und Pitch-Winkel um:Roll: Rotation um die X-Achse
Pitch: Rotation um die Y-Achse
Es wird nur die Schwerkraft verwendet, daher kann der Yaw-Winkel nicht bestimmt werden (und bleibt auf 0 fixiert).
def accel_to_rp(ax, ay, az): """ Convert accelerometer (m/s²) to roll/pitch in radians (gravity-referenced). roll = rotation around X (right-hand rule) pitch = rotation around Y """ # Convert from m/s² to g (9.80665 m/s² = 1g) ax_g = ax / 9.80665 ay_g = ay / 9.80665 az_g = az / 9.80665 g = math.sqrt(ax_g*ax_g + ay_g*ay_g + az_g*az_g) + 1e-9 axn, ayn, azn = ax_g / g, ay_g / g, az_g / g roll = math.atan2(ayn, azn) pitch = math.atan2(-axn, math.sqrt(ayn*ayn + azn*azn)) return roll, pitch
Referenzorientierung (Baseline)
Beim ersten Messwert:
werden der aktuelle
roll- undpitch-Winkel als Referenz gespeichert (roll0,pitch0).Alle folgenden Orientierungen werden als relative Winkel berechnet:
roll_rel = roll_abs - roll0 pitch_rel = pitch_abs - pitch0
Dadurch wird die Anfangsposition des Geräts zu 0°, 0°.
Benutzerkonfigurierbare Achsenumkehr
Die beiden Flags
FLIP_XundFLIP_Yermöglichen es, Bewegungen auf den jeweiligen Achsen zu invertieren:Setzen Sie
FLIP_X = True, wenn sich die Rollbewegung auf dem Display umgekehrt anfühlt.Setzen Sie
FLIP_Y = True, wenn sich die Pitchbewegung umgekehrt anfühlt.
Dies ist hilfreich, wenn die IMU gedreht montiert oder anders ausgerichtet ist.
Glättung (EMA)
Die Funktion
ema()verwendet eine exponentielle gleitende Mittelung (Exponential Moving Average):reduziert Zittern durch Sensorsignalrauschen
sorgt für eine flüssigere Würfelbewegung
ROLL_EMAundPITCH_EMAbestimmen den Kompromiss zwischen Reaktionsgeschwindigkeit und Glätte.def ema(prev, new, alpha): """Exponential smoothing to reduce jitter.""" return alpha * new + (1.0 - alpha) * prev
3D-Würfelrotation
rotate_point()wendet Rotationsmatrizen auf jeden Eckpunkt des Würfels an:def rotate_point(p, roll, pitch, yaw=0.0): """Rotate p=(x,y,z) by Rx(roll)*Ry(pitch)*Rz(yaw). Yaw fixed to 0 for gravity-only.""" x, y, z = p # Rx cr, sr = math.cos(roll), math.sin(roll) y, z = (y*cr - z*sr), (y*sr + z*cr) # Ry cp, sp = math.cos(pitch), math.sin(pitch) x, z = (x*cp + z*sp), (-x*sp + z*cp) # Rz (kept for completeness) if yaw: cz, sz = math.cos(yaw), math.sin(yaw) x, y = (x*cz - y*sz), (x*sz + y*cz) return (x, y, z)
Rx(roll)gefolgt vonRy(pitch)(Yaw bleibt auf 0 gesetzt)Erzeugt rotierte 3D-Koordinaten
project_point()wandelt anschließend die 3D-Koordinaten mithilfe einer orthographischen Projektion in 2D-OLED-Positionen um.def project_point(p, scale=CUBE_SIZE, cx=WIDTH//2, cy=HEIGHT//2): """ Orthographic projection. We flip the screen Y here so that positive 3D Y appears upward on the OLED (more intuitive for tilt). """ x, y, _z = p return int(cx + scale * x), int(cy - scale * y)
Den Würfel zeichnen
draw_cube():Löscht den Bildschirm
Dreht und projiziert alle 8 Eckpunkte des Würfels
Zeichnet alle Kanten als Drahtgittermodell
Füllt eine Fläche (
FRONT_FACE), sodass leicht erkennbar ist, welche Seite zum Betrachter zeigtZeigt optional Roll und Pitch in Grad oben links an
def draw_cube(roll, pitch, yaw=0.0, annotate=True): """Render the cube with one filled face.""" draw.rectangle((0, 0, WIDTH, HEIGHT), outline=0, fill=0) rverts = [rotate_point(v, roll, pitch, yaw) for v in VERTS] pts = [project_point(v) for v in rverts] # Gefüllte Vorderseite face_xy = [pts[i] for i in FRONT_FACE] draw.polygon(face_xy, outline=255, fill=255) # Drahtgitter-Kanten for a, b in EDGES: x0, y0 = pts[a] x1, y1 = pts[b] draw.line((x0, y0, x1, y1), fill=255) if annotate: rdeg = math.degrees(roll) pdeg = math.degrees(pitch) draw.text((2, 2), f"R:{rdeg:+.0f} P:{pdeg:+.0f}", font=font, fill=255)
Fehlerbehebung
Der Würfel bewegt sich nicht
Stellen Sie sicher, dass I2C auf dem Raspberry Pi aktiviert ist.
Überprüfen Sie, ob die korrekte I2C-Adresse von Ihrem IMU-Treiber verwendet wird.
Die Bewegung wirkt umgekehrt
Schalten Sie
FLIP_XoderFLIP_Yum, um die Richtung zu invertieren.Legen Sie das Board flach hin und neigen Sie es dann langsam entlang einer Achse, um herauszufinden, welche Achse umgedreht werden muss.
Der Würfel ist zu ruckelig
Erhöhen Sie die Glättung, indem Sie
ROLL_EMA/PITCH_EMAverringern (z. B. 0.1).Stellen Sie sicher, dass das Board mechanisch stabil liegt und keine Kabel daran ziehen.
Der Würfel ist geneigt, obwohl das Board flach liegt
Halten Sie das Board ruhig und starten Sie das Skript neu; die erste Messung wird als Referenz verwendet.
Stellen Sie sicher, dass das Board wirklich flach liegt, wenn das Programm startet.
OLED zeigt nichts an
Überprüfen Sie die OLED-I2C-Adresse (häufig
0x3C).Kontrollieren Sie die Verkabelung und ob der Display-Kontrast ausreichend ist.
Stellen Sie sicher, dass
adafruit-circuitpython-ssd1306installiert ist.
Probieren Sie es selbst aus
Yaw aus dem Gyroskop hinzufügen
Kombinieren Sie Gyroskop-Integration mit Beschleunigungsdaten (ein Komplementärfilter), um eine Yaw-Achse hinzuzufügen und eine vollständige 3D-Rotation des Würfels zu ermöglichen.
Größe oder Position des Würfels ändern
Passen Sie
CUBE_SIZEoder das Projektionszentrum an, um den Würfel zu verschieben oder größer/kleiner darzustellen:Hineinzoomen für einen dramatischeren Effekt
Den Würfel etwas nach oben verschieben, um mehr Platz für Text zu lassen
Ein Drahtgitter hinzufügen
Zeichnen Sie ein einfaches „Boden“-Raster hinter dem Würfel, um die 3D-Bewegung stärker zu betonen.
Auto-Recenter-Funktion hinzufügen
Halten Sie eine Taste länger gedrückt (oder verwenden Sie eine Tasteneingabe), um die Referenzorientierung während der Laufzeit zurückzusetzen.
Mehrere Anzeigemodi
Umschalten zwischen:
Nur Drahtgitter
Nur gefüllte Fläche
Flächenschattierung basierend auf dem Neigungswinkel
Diese Erweiterungen verwandeln den einfachen Gravity-Cube in ein leistungsfähiges 3D-IMU-Visualisierungstool.