Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato ai nuovi annunci di prodotti e alle anteprime.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [qui] e unisciti oggi!
4.3 Servo in Movimento¶
Un Servo è un tipo di dispositivo basato sulla posizione, noto per la sua capacità di mantenere angoli specifici e offrire una rotazione precisa. Questa caratteristica lo rende estremamente desiderabile per i sistemi di controllo che richiedono regolazioni costanti dell’angolo. Non sorprende quindi che i Servi siano ampiamente utilizzati in giocattoli telecomandati di fascia alta, dai modelli di aerei alle repliche di sottomarini, fino ai robot telecomandati più sofisticati.
In questa avvincente avventura, ci sfideremo a manipolare il Servo in un modo unico: facendolo oscillare! Questo progetto offre una brillante opportunità per approfondire le dinamiche dei Servi, affinare le tue competenze nei sistemi di controllo precisi e acquisire una comprensione più profonda del loro funzionamento.
Sei pronto a far ballare il Servo al ritmo delle tue note? Iniziamo questo entusiasmante viaggio!
Componenti Necessari
In questo progetto, avremo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
ESP32 Starter Kit |
320+ |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
Piedinatura Disponibile
Ecco un elenco dei piedini disponibili sulla scheda ESP32 per questo progetto.
Piedini Disponibili |
IO13, IO12, IO14, IO27, IO26, IO25, IO33, IO32, IO15, IO2, IO0, IO4, IO5, IO18, IO19, IO21, IO22, IO23 |
Schema Elettrico
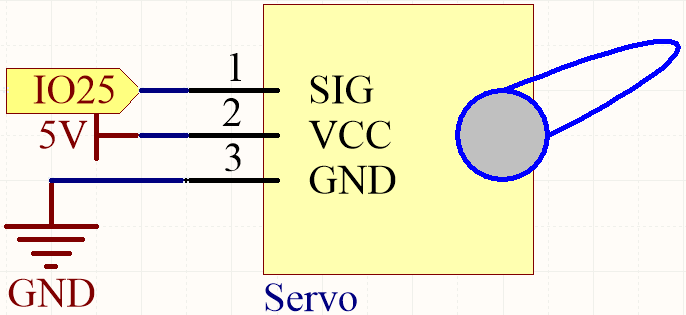
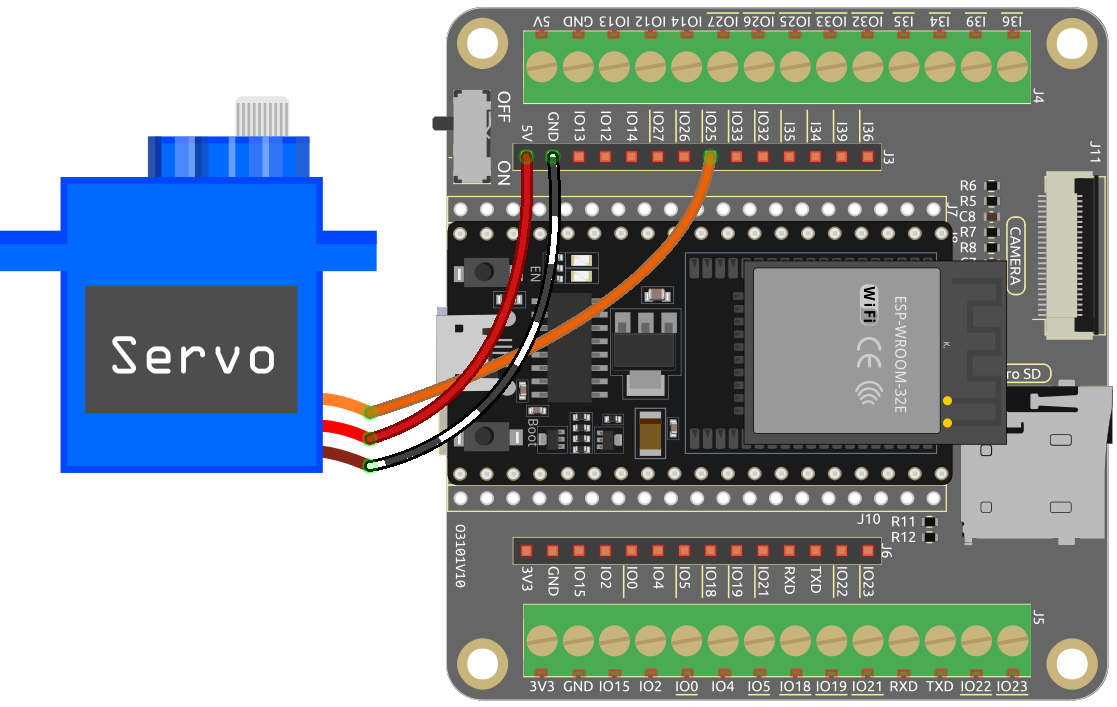
Collegamenti
Il filo arancione è il segnale e va collegato a IO25.
Il filo rosso è il VCC e va collegato a 5V.
Il filo marrone è il GND e va collegato a GND.
Codice
Nota
Apri il file
4.3_servo.inonel percorsoesp32-starter-kit-main\c\codes\4.3_servo. Oppure copia questo codice nell”Arduino IDE.Dopo aver selezionato la scheda (ESP32 Dev Module) e la porta appropriata, fai clic sul pulsante Upload.
Qui viene utilizzata la libreria
ESP32Servo, che puoi installare dal Library Manager.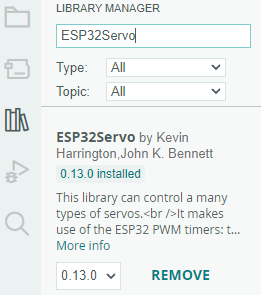
Una volta caricato il codice, vedrai il braccio del servo ruotare nell’intervallo 0°~180°.
Come funziona?
Includi la libreria ESP32Servo: Questa riga importa la libreria ESP32Servo, necessaria per controllare il servomotore.
#include <ESP32Servo.h>
Definisci il servo e il piedino a cui è collegato: Questa sezione dichiara un oggetto Servo (
myServo) e un intero costante (servoPin) per rappresentare il piedino a cui è collegato il servomotore (piedino 25).// Definisci il servo e il piedino a cui è collegato Servo myServo; const int servoPin = 25;
Definisci la larghezza minima e massima degli impulsi per il servo: Questa sezione imposta la larghezza minima e massima degli impulsi per il servomotore (0,5 ms e 2,5 ms, rispettivamente).
// Definisci la larghezza minima e massima degli impulsi per il servo const int minPulseWidth = 500; // 0,5 ms const int maxPulseWidth = 2500; // 2,5 ms
La funzione
setupinizializza il servomotore collegandolo al piedino specificato e impostando il range della larghezza degli impulsi. Imposta anche la frequenza PWM per il servo a 50Hz, standard per i servomotori.void setup() { // Collega il servo al piedino specificato e imposta il range della larghezza degli impulsi myServo.attach(servoPin, minPulseWidth, maxPulseWidth); // Imposta la frequenza PWM per il servo myServo.setPeriodHertz(50); // Servo standard a 50Hz }
attach (int pin, int min, int max): Questa funzione collega il servomotore al piedino GPIO specificato e imposta la larghezza minima e massima degli impulsi per il servo.pin: Il numero del piedino GPIO a cui è collegato il servo.minemax: la larghezza minima e massima degli impulsi, rispettivamente, in microsecondi. Questi valori definiscono il range di movimento del servomotore.
setPeriodHertz(int hertz): Questa funzione imposta la frequenza PWM per il servomotore in hertz.hertz: La frequenza PWM desiderata in hertz. La frequenza PWM predefinita per i servi è 50Hz, che è adatta per la maggior parte delle applicazioni.
La funzione
loopè la parte principale del codice che viene eseguita continuamente. Ruota il servomotore da 0 a 180 gradi, poi torna a 0 gradi. Questo viene fatto mappando l’angolo alla corrispondente larghezza dell’impulso e aggiornando il servomotore con il nuovo valore della larghezza dell’impulso.void loop() { // Ruota il servo da 0 a 180 gradi for (int angle = 0; angle <= 180; angle++) { int pulseWidth = map(angle, 0, 180, minPulseWidth, maxPulseWidth); myServo.writeMicroseconds(pulseWidth); delay(15); } // Ruota il servo da 180 a 0 gradi for (int angle = 180; angle >= 0; angle--) { int pulseWidth = map(angle, 0, 180, minPulseWidth, maxPulseWidth); myServo.writeMicroseconds(pulseWidth); delay(15); } }
writeMicroseconds(int value): Questa funzione imposta la larghezza dell’impulso del servomotore in microsecondi.value: La larghezza dell’impulso desiderata in microsecondi.
La funzione
writeMicroseconds(int value)prende un valore intero come argomento, che rappresenta la larghezza dell’impulso desiderata in microsecondi. Questo valore dovrebbe normalmente rientrare nel range specificato dalle larghezze degli impulsi minime e massime (minPulseWidthemaxPulseWidth) definite in precedenza nel codice. La funzione imposta quindi la larghezza dell’impulso per il servomotore, facendolo muovere nella posizione corrispondente.