Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue abilità.
Anteprime Esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti Esclusivi: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a promozioni e concorsi durante le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
3.2 Movimento¶
Questo progetto si basa su 3.1 Testare l’Auto per far muovere l’auto in tutte le direzioni.
Prima di iniziare la programmazione, rivediamo il principio di funzionamento del modulo L9110.
Ecco la tabella della verità del Motore B:
B-1A |
B-1B(B-2A) |
Stato del Motore B |
|---|---|---|
1 |
0 |
Ruota in senso orario |
0 |
1 |
Ruota in senso antiorario |
0 |
0 |
Freno |
1 |
1 |
Stop |
Ecco la tabella della verità del Motore A:
A-1A |
A-1B |
Stato del Motore A |
|---|---|---|
1 |
0 |
Ruota in senso orario |
0 |
1 |
Ruota in senso antiorario |
0 |
0 |
Freno |
1 |
1 |
Stop |
Programmazione¶
Ora crea dei blocchi per far muovere l’auto in avanti, indietro, girare a sinistra, a destra e fermarsi rispettivamente.
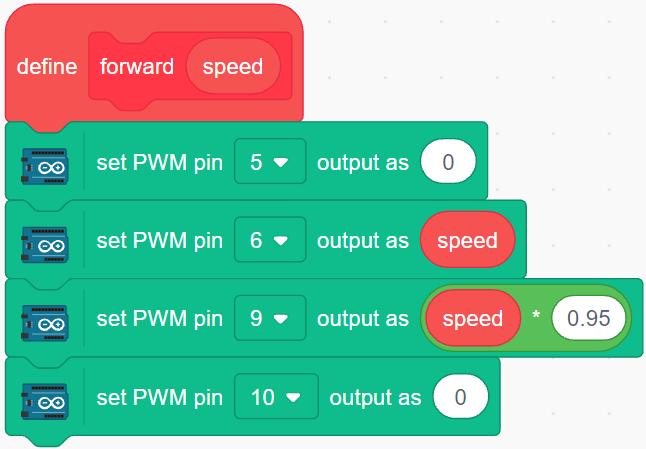
1. Avanzare
Il motore destro ruota in senso orario e il motore sinistro in senso antiorario per far avanzare l’auto.
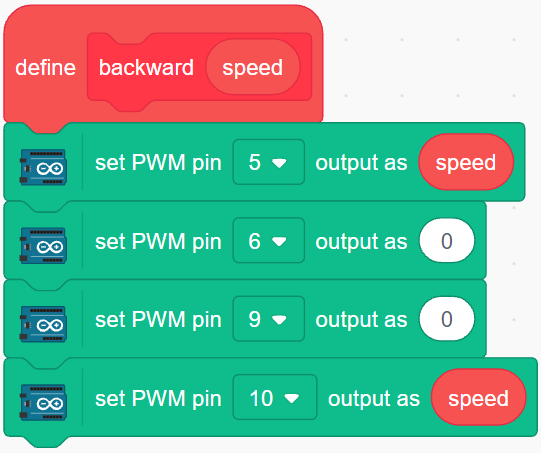
2. Andare all’indietro
Per andare indietro, è l’opposto: il motore destro deve ruotare in senso antiorario e il motore sinistro in senso orario.
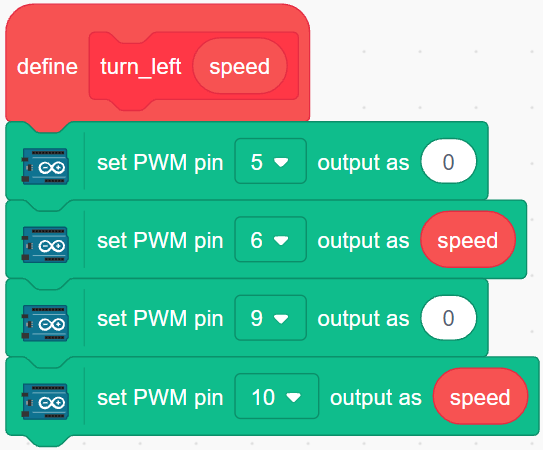
3. Girare a sinistra
Entrambi i motori, sinistro e destro, ruotano in senso orario per far girare l’auto a sinistra.
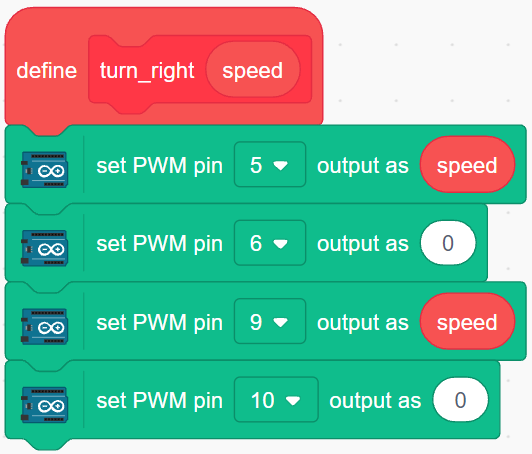
4. Girare a destra
Allo stesso modo, per girare a destra, entrambi i motori ruotano in senso antiorario.
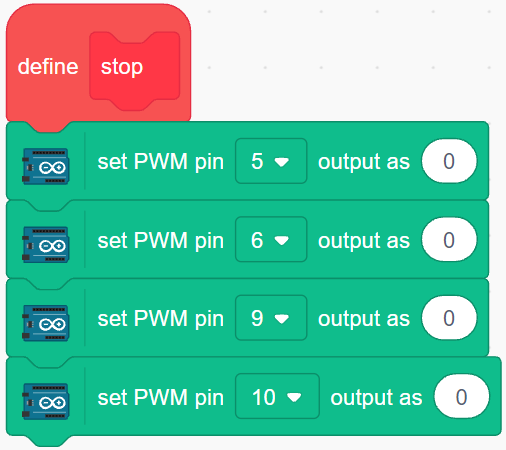
5. Fermare
Ferma l’auto impostando tutti i motori a 0.
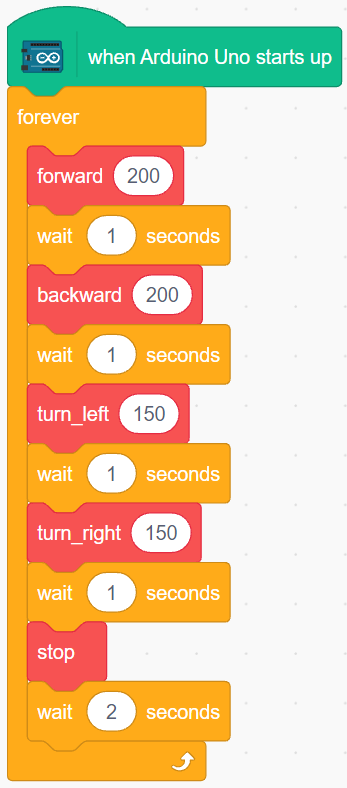
6. Far muovere l’auto
Fai muovere l’auto in avanti, indietro, a sinistra e a destra per 1 secondo, poi fermala. Poiché tutti i blocchi sono posizionati nel blocco [Per sempre], vedrai l’auto ripetere le azioni descritte.