Nota
Ciao, benvenuto nella community di SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché Unirsi?
Supporto Esperti: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara & Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Accedi in anteprima agli annunci di nuovi prodotti e alle anticipazioni.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa ai giveaway e alle promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [qui] e unisciti oggi stesso!
6.4 Ausilio al Parcheggio¶
Immagina questo: sei in auto, pronto a fare retromarcia per entrare in un parcheggio stretto. Con il nostro progetto, avrai un modulo ultrasonico montato sul retro del veicolo che fungerà da occhio digitale. Quando innesti la retromarcia, il modulo si attiva emettendo impulsi ultrasonici che rimbalzano sugli ostacoli dietro di te.
La magia avviene quando questi impulsi tornano al modulo. Esso calcola rapidamente la distanza tra la tua auto e gli oggetti circostanti, trasformando questi dati in un feedback visivo in tempo reale visualizzato su un vivace schermo LCD. Vedrai indicatori dinamici a colori che rappresentano la vicinanza degli ostacoli, garantendo una comprensione chiara dell’ambiente circostante.
Ma non ci siamo fermati qui. Per immergerti ulteriormente nell’esperienza di guida, abbiamo incorporato un vivace cicalino. Mentre la tua auto si avvicina a un ostacolo, il ritmo del cicalino aumenta, creando una sinfonia uditiva di avvertimenti. È come avere un’orchestra personale che ti guida attraverso le complessità del parcheggio in retromarcia.
Questo progetto innovativo combina tecnologia all’avanguardia con un’interfaccia utente interattiva, rendendo la tua esperienza di retromarcia sicura e senza stress. Con il modulo ultrasonico, il display LCD e il vivace cicalino che lavorano in armonia, ti sentirai sicuro e a tuo agio mentre manovri in spazi ristretti, permettendoti di concentrarti sul piacere della guida.
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
OGGETTI IN QUESTO KIT |
LINK |
|---|---|---|
ESP32 Starter Kit |
320+ |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
- |
|
Schema
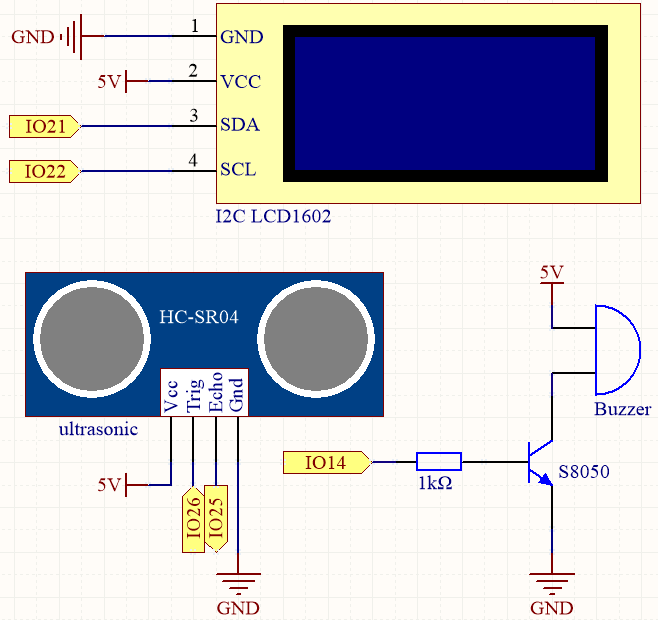
Il sensore ultrasonico nel progetto emette onde sonore ad alta frequenza e misura il tempo impiegato dalle onde per rimbalzare dopo aver colpito un oggetto. Analizzando questi dati, è possibile calcolare la distanza tra il sensore e l’oggetto. Per fornire un avviso quando l’oggetto è troppo vicino, viene utilizzato un cicalino per produrre un segnale acustico. Inoltre, la distanza misurata viene visualizzata su uno schermo LCD per una facile visualizzazione.
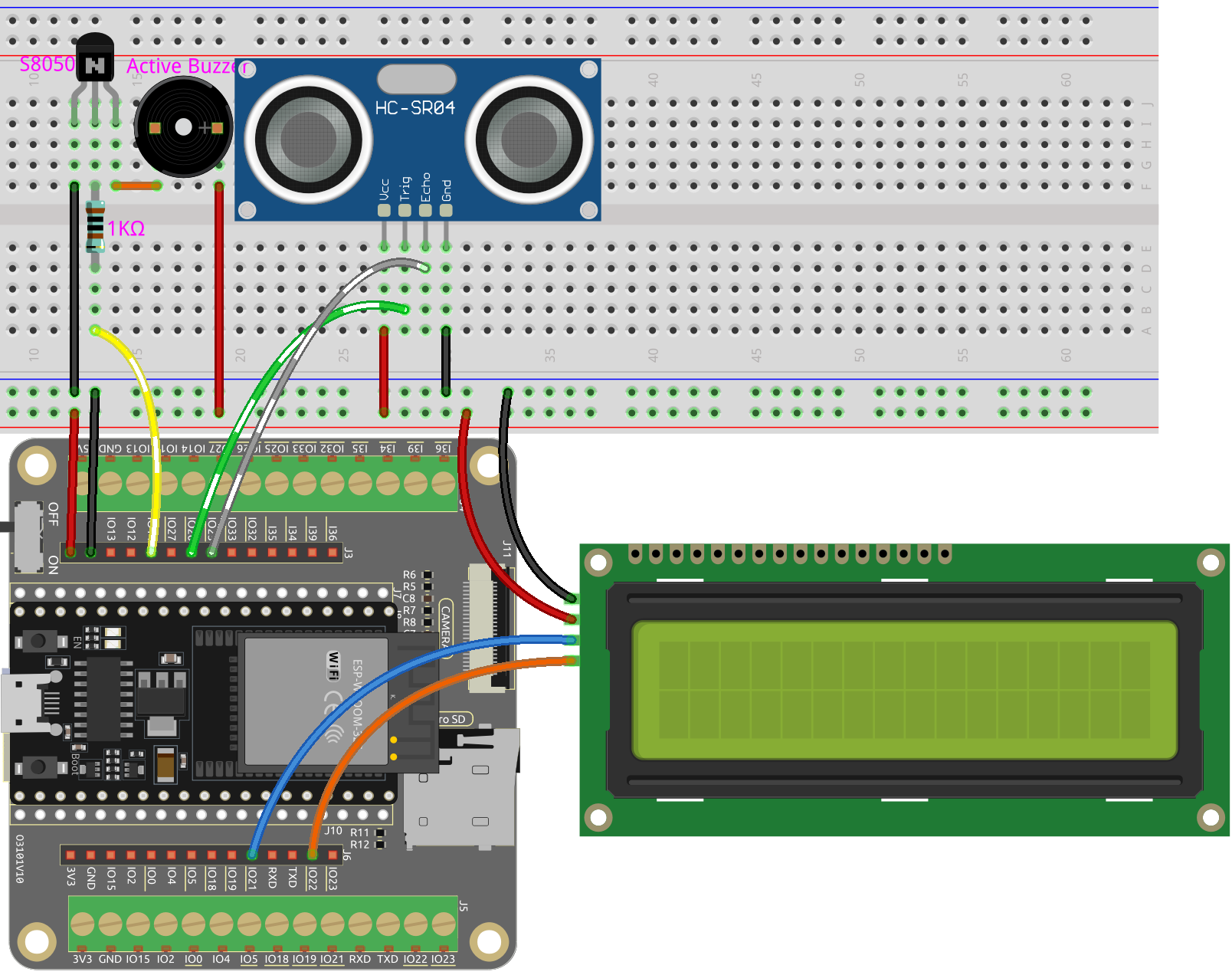
Cablatura
Codice
Nota
Apri il file
6.4_reversing_aid.pysituato nel percorsoesp32-starter-kit-main\micropython\codes, oppure copia e incolla il codice in Thonny. Successivamente, fai clic su «Esegui lo script corrente» o premi F5 per eseguirlo.Assicurati di selezionare l’interprete «MicroPython (ESP32).COMxx» nell’angolo in basso a destra.
# Importa le librerie necessarie
from machine import Pin
import time
from lcd1602 import LCD
import _thread
# Inizializza il cicalino
buzzer = Pin(14, Pin.OUT)
# Inizializza il modulo ultrasonico
TRIG = Pin(26, Pin.OUT)
ECHO = Pin(25, Pin.IN)
# Inizializza il display LCD1602
lcd = LCD()
dis = 100
# Calcola la distanza
def distance():
# Assicurati che il trigger sia inizialmente spento
TRIG.off()
time.sleep_us(2) # Attendi 2 microsecondi
# Invia un impulso di 10 microsecondi al pin di trigger
TRIG.on()
time.sleep_us(10)
TRIG.off()
# Attendi che il pin di echo si attivi
while not ECHO.value():
pass
# Registra il tempo in cui il pin di echo si attiva
time1 = time.ticks_us()
# Attendi che il pin di echo si disattivi
while ECHO.value():
pass
# Registra il tempo in cui il pin di echo si disattiva
time2 = time.ticks_us()
# Calcola la differenza di tempo tra i due tempi registrati
during = time.ticks_diff(time2, time1)
# Calcola e restituisci la distanza (in cm) utilizzando la velocità del suono (340 m/s)
return during * 340 / 2 / 10000
# Thread per aggiornare continuamente la lettura del sensore ultrasonico
def ultrasonic_thread():
global dis
while True:
dis = distance()
# Pulisci lo schermo LCD
lcd.clear()
# Visualizza la distanza
lcd.write(0, 0, 'Dis: %.2f cm' % dis)
time.sleep(0.5)
# Avvia il thread di lettura del sensore ultrasonico
_thread.start_new_thread(ultrasonic_thread, ())
# Funzione per emettere un beep con il cicalino
def beep():
buzzer.value(1)
time.sleep(0.1)
buzzer.value(0)
time.sleep(0.1)
# Inizializza la variabile degli intervalli
intervals = 10000000
previousMills = time.ticks_ms()
time.sleep(1)
# Ciclo principale
while True:
# Aggiorna gli intervalli in base alla distanza
if dis < 0 and dis > 500:
pass
elif dis <= 10:
intervals = 300
elif dis <= 20:
intervals = 500
elif dis <= 50:
intervals = 1000
else:
intervals = 2000
# Stampa la distanza se non è -1
if dis != -1:
print('Distance: %.2f' % dis)
time.sleep_ms(100)
# Controlla se è il momento di emettere un beep
currentMills = time.ticks_ms()
if time.ticks_diff(currentMills, previousMills) >= intervals:
beep()
previousMills = currentMills
Quando lo script è in esecuzione, il modulo ultrasonico rileverà continuamente la distanza degli ostacoli davanti a esso e visualizzerà la distanza sul Shell e sull’I2C LCD1602.
Man mano che l’ostacolo si avvicina, la frequenza dei beep del cicalino diventerà più rapida.
La funzione
ultrasonic_thread()viene eseguita in un thread separato in modo da poter aggiornare continuamente la misurazione della distanza senza bloccare il ciclo principale.
Nota
Se il codice e il cablaggio sono corretti, ma l’LCD non riesce a visualizzare alcun contenuto, puoi regolare il potenziometro sul retro per aumentare il contrasto.