Nota
Ciao, benvenuto nella community di SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché Unirsi?
Supporto da Esperti: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara & Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Accedi in anteprima agli annunci di nuovi prodotti e alle anticipazioni.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [qui] e unisciti oggi stesso!
5.12 Misurazione della Distanza¶
Il modulo ultrasonico viene utilizzato per la misurazione della distanza o per il rilevamento di oggetti. In questo progetto, programmeremo il modulo per ottenere le distanze dagli ostacoli. Inviando impulsi ultrasonici e misurando il tempo necessario affinché rimbalzino indietro, possiamo calcolare le distanze. Questo ci consente di implementare azioni basate sulla distanza o comportamenti di evitamento degli ostacoli.
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
OGGETTI IN QUESTO KIT |
LINK |
|---|---|---|
ESP32 Starter Kit |
320+ |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
Pin Disponibili
Pin Disponibili
Ecco un elenco dei pin disponibili sulla scheda ESP32 per questo progetto.
Per Ingresso
IO13, IO14, IO27, IO26, IO25, IO33, IO32, I35, I34, I39, I36, IO4, IO18, IO19, IO21, IO22, IO23
Per Uscita
IO13, IO12, IO14, IO27, IO26, IO25, IO33, IO32, IO15, IO2, IO0, IO4, IO5, IO18, IO19, IO21, IO22, IO23
Schema
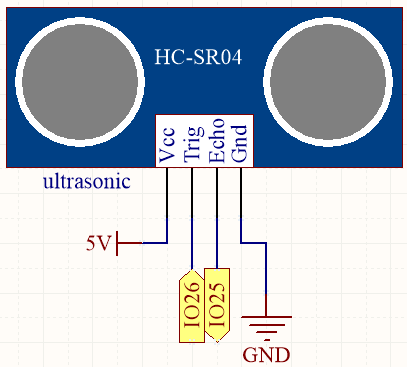
L’ESP32 invia un set di segnali a onda quadra al pin Trig del sensore ultrasonico ogni 10 secondi. Questo provoca l’emissione di un segnale ultrasonico a 40kHz. Se c’è un ostacolo davanti, le onde ultrasoniche verranno riflesse indietro.
Registrando il tempo che intercorre tra l’invio e la ricezione del segnale, dividendo per 2 e moltiplicando per la velocità della luce, è possibile determinare la distanza dall’ostacolo.
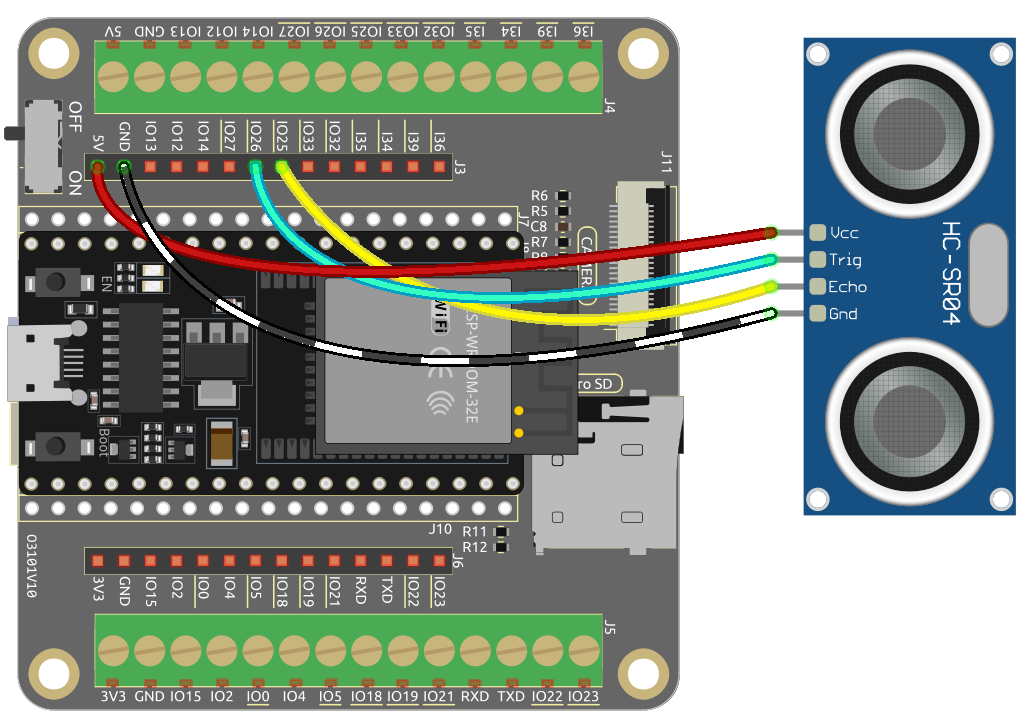
Cablaggio
Codice
Nota
Apri il file
5.12_ultrasonic.pysituato nel percorsoesp32-starter-kit-main\micropython\codes, oppure copia e incolla il codice in Thonny. Successivamente, fai clic su «Esegui lo script corrente» o premi F5 per eseguirlo.Assicurati di selezionare l’interprete «MicroPython (ESP32).COMxx» nell’angolo in basso a destra.
import machine
import time
# Definisci i pin di trigger ed echo per il sensore di distanza
TRIG = machine.Pin(26, machine.Pin.OUT)
ECHO = machine.Pin(25, machine.Pin.IN)
# Calcola la distanza utilizzando il sensore ultrasonico
def distance():
# Assicurati che il trigger sia inizialmente spento
TRIG.off()
time.sleep_us(2) # Attendi 2 microsecondi
# Invia un impulso di 10 microsecondi al pin di trigger
TRIG.on()
time.sleep_us(10)
TRIG.off()
# Attendi che il pin di echo diventi alto
while not ECHO.value():
pass
# Registra il tempo in cui il pin di echo diventa alto
time1 = time.ticks_us()
# Attendi che il pin di echo diventi basso
while ECHO.value():
pass
# Registra il tempo in cui il pin di echo diventa basso
time2 = time.ticks_us()
# Calcola la differenza di tempo tra i due tempi registrati
during = time.ticks_diff(time2, time1)
# Calcola e restituisci la distanza (in cm) utilizzando la velocità del suono (340 m/s)
return during * 340 / 2 / 10000
# Misura e stampa continuamente la distanza
while True:
dis = distance()
print('Distance: %.2f' % dis)
time.sleep_ms(300) # Attendi 300 millisecondi prima di ripetere
Una volta che il programma è in esecuzione, la Shell stamperà la distanza rilevata dal sensore ultrasonico dall’ostacolo davanti.