Nota
Ciao, benvenuto nella community di SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché Unirsi?
Supporto Esperti: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara & Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Accedi in anteprima agli annunci di nuovi prodotti e alle anticipazioni.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa ai giveaway e alle promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [qui] e unisciti oggi stesso!
4.3 Servo in Movimento¶
Un Servo è un dispositivo basato sulla posizione noto per la sua capacità di mantenere angoli specifici e fornire una rotazione precisa. Questo lo rende molto desiderabile per i sistemi di controllo che richiedono regolazioni angolari costanti. Non sorprende che i Servo abbiano trovato ampio impiego in giocattoli radiocomandati di fascia alta, dai modelli di aeroplani alle repliche di sottomarini e ai sofisticati robot radiocomandati.
In questa intrigante avventura, ci sfideremo a manipolare il Servo in un modo unico: facendolo oscillare! Questo progetto offre una brillante opportunità per approfondire le dinamiche dei Servo, affinare le tue abilità nei sistemi di controllo precisi e acquisire una comprensione più profonda del loro funzionamento.
Sei pronto a far danzare il Servo al tuo ritmo? Iniziamo questo emozionante viaggio!
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
OGGETTI IN QUESTO KIT |
LINK |
|---|---|---|
ESP32 Starter Kit |
320+ |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
Pin Disponibili
Ecco un elenco dei pin disponibili sulla scheda ESP32 per questo progetto.
Pin Disponibili |
IO13, IO12, IO14, IO27, IO26, IO25, IO33, IO32, IO15, IO2, IO0, IO4, IO5, IO18, IO19, IO21, IO22, IO23 |
Schema
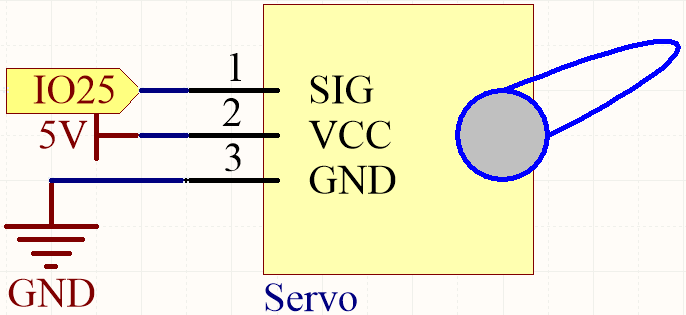
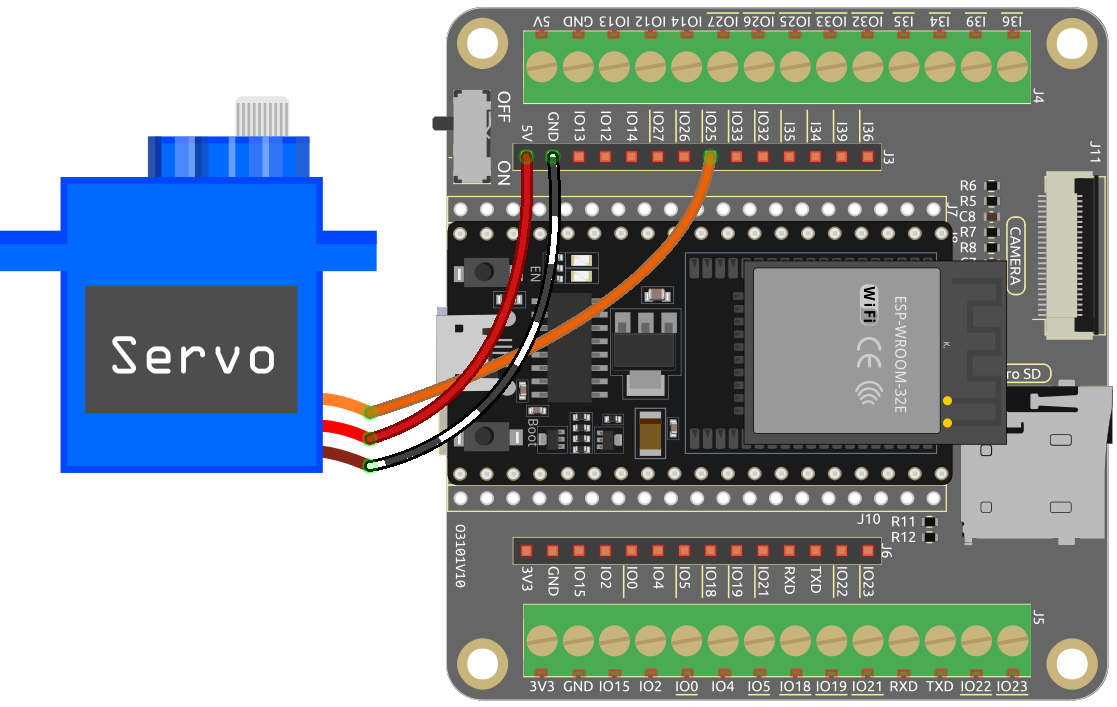
Cablaggio
Il filo arancione è il segnale ed è collegato a IO25.
Il filo rosso è VCC ed è collegato a 5V.
Il filo marrone è GND ed è collegato a GND.
Codice
Nota
Apri il file
4.3_swinging_servo.pysituato nel percorsoesp32-starter-kit-main\micropython\codes, oppure copia e incolla il codice in Thonny. Successivamente, fai clic su «Esegui lo script corrente» o premi F5 per eseguirlo.Assicurati di selezionare l’interprete «MicroPython (ESP32).COMxx» nell’angolo in basso a destra.
import machine
import time
# Crea un oggetto PWM (Pulse Width Modulation) sul pin 25
servo = machine.PWM(machine.Pin(25))
# Imposta la frequenza del segnale PWM a 50 Hz, comune per i servomotori
servo.freq(50)
# Definisci una funzione per la mappatura degli intervalli
def interval_mapping(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
# Definisci una funzione per impostare un angolo al servo
def servo_write(pin, angle):
pulse_width = interval_mapping(angle, 0, 180, 0.5, 2.5) # Calcola la larghezza dell'impulso
duty = int(interval_mapping(pulse_width, 0, 20, 0, 1023)) # Calcola il ciclo di lavoro
pin.duty(duty) # Imposta il ciclo di lavoro del segnale PWM
# Create an infinite loop
while True:
# Loop through angles from 0 to 180 degrees
for angle in range(180):
servo_write(servo, angle)
time.sleep_ms(20)
# Loop through angles from 180 to 0 degrees in reverse
for angle in range(180, -1, -1):
servo_write(servo, angle)
time.sleep_ms(20)
Quando esegui questo codice, il servo si muoverà continuamente avanti e indietro tra 0 e 180 gradi.
Come funziona?
Importa le librerie necessarie:
machineper controllare l’hardware del microcontrollore etimeper aggiungere ritardi.import machine import time
Crea un oggetto PWM (Pulse Width Modulation) sul pin 25 e imposta la sua frequenza a 50 Hz, comune per i servomotori.
# Crea un oggetto PWM (Pulse Width Modulation) sul pin 25 servo = machine.PWM(machine.Pin(25)) # Imposta la frequenza del segnale PWM a 50 Hz, comune per i servomotori servo.freq(50)
Definisci una funzione
interval_mappingper mappare i valori da un intervallo a un altro. Questa sarà utilizzata per convertire l’angolo nella corrispondente larghezza dell’impulso e ciclo di lavoro.def interval_mapping(x, in_min, in_max, out_min, out_max): return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
Definisci una funzione
servo_writeche prende un oggetto PWM e un angolo come input. Calcola la larghezza dell’impulso e il ciclo di lavoro in base all’angolo dato, e quindi imposta l’uscita PWM di conseguenza.def servo_write(pin, angolo): pulse_width = interval_mapping(angolo, 0, 180, 0.5, 2.5) # Calcola la larghezza dell'impulso duty = int(interval_mapping(pulse_width, 0, 20, 0, 1023)) # Calcola il ciclo di lavoro pin.duty(duty) # Imposta il ciclo di lavoro del segnale PWM
In questa funzione, viene chiamata
interval_mapping()per mappare l’intervallo di angoli 0 ~ 180 all’intervallo di larghezza dell’impulso 0,5 ~ 2,5ms.Perché è 0,5~2,5? Questo è determinato dal modo di funzionamento del Servo.
Successivamente, converti la larghezza dell’impulso da periodo a duty.
Poiché
duty()non può avere decimali quando utilizzato (il valore non può essere di tipo float), abbiamo utilizzatoint()per forzare il duty ad essere convertito in un tipo int.
Crea un ciclo infinito con due loop annidati.
while True: # Loop through angles from 0 to 180 degrees for angle in range(180): servo_write(servo, angle) time.sleep_ms(20) # Loop through angles from 180 to 0 degrees in reverse for angle in range(180, -1, -1): servo_write(servo, angle) time.sleep_ms(20)
Il primo loop annidato itera attraverso gli angoli da 0 a 180 gradi, e il secondo loop annidato itera attraverso gli angoli da 180 a 0 gradi al contrario.
In ogni iterazione, la funzione
servo_writeviene chiamata con l’angolo corrente e viene aggiunto un ritardo di 20 millisecondi.