Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
5.12 Entfernung messen¶
Das Ultraschallmodul wird zur Entfernungsmessung oder Objekterkennung verwendet. In diesem Projekt programmieren wir das Modul, um Hindernisentfernungen zu ermitteln. Indem wir Ultraschallimpulse senden und die Zeit messen, die sie zum Zurückprallen benötigen, können wir Entfernungen berechnen. Dies ermöglicht es uns, distanzbasierte Aktionen oder Hindernisvermeidungsverhalten zu implementieren.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
ESP32 Starter Kit |
320+ |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENVORSTELLUNG |
KAUF-LINK |
|---|---|
Verfügbare Pins
Verfügbare Pins
Hier ist eine Liste der verfügbaren Pins auf dem ESP32-Platine für dieses Projekt.
Für Eingang
IO13, IO14, IO27, IO26, IO25, IO33, IO32, I35, I34, I39, I36
Für Ausgang
IO13, IO12, IO14, IO27, IO26, IO25, IO33, IO32, IO15, IO2, IO0, IO4, IO5, IO18, IO19, IO21, IO22, IO23
Schaltplan

Der ESP32 sendet alle 10 Sekunden einen Satz von Rechteckwellensignalen an den Trig-Pin des Ultraschallsensors. Dies veranlasst den Ultraschallsensor, ein 40kHz Ultraschallsignal nach außen zu senden. Wenn sich ein Hindernis vorne befindet, werden die Ultraschallwellen zurückreflektiert.
Durch die Aufzeichnung der Zeit, die vom Senden bis zum Empfangen des Signals vergeht, diese durch 2 teilen und mit der Schallgeschwindigkeit multiplizieren, können Sie die Entfernung zum Hindernis bestimmen.
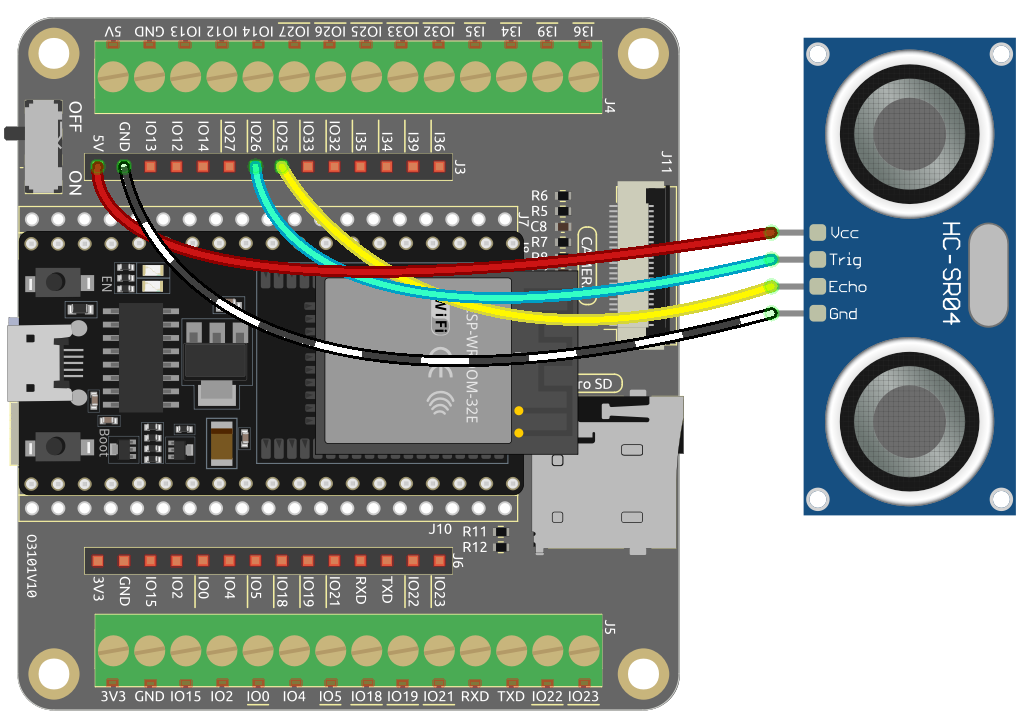
Verdrahtung
Code
Bemerkung
Öffnen Sie die Datei
5.12_ultrasonic.inounter dem Pfadesp32-starter-kit-main\c\codes\5.12_ultrasonic.Nachdem Sie das Board (ESP32 Dev Module) und den passenden Port ausgewählt haben, klicken Sie auf den Upload-Button.
Denken Sie daran, die serielle Kommunikationsgeschwindigkeit auf 115200 einzustellen.
Nachdem der Code erfolgreich hochgeladen wurde, gibt der serielle Monitor die Entfernung zwischen dem Ultraschallsensor und dem Hindernis vorne aus.
Wie funktioniert das?
Über die Anwendung des Ultraschallsensors können wir direkt die Unterfunktion überprüfen.
float readSensorData(){// ...}
Der
trigPindes Ultraschallmoduls sendet alle 2us ein 10us-Rechteckwellensignal.// Trigger a low signal before sending a high signal digitalWrite(trigPin, LOW); delayMicroseconds(2); // Send a 10-microsecond high signal to the trigPin digitalWrite(trigPin, HIGH); delayMicroseconds(10); // Return to low signal digitalWrite(trigPin, LOW);
Der
echoPinempfängt ein Hochpegeleingangssignal, wenn sich ein Hindernis im Bereich befindet, und verwendet die FunktionpulseIn(), um die Zeit vom Senden bis zum Empfangen aufzuzeichnen.unsigned long microsecond = pulseIn(echoPin, HIGH);
Die Schallgeschwindigkeit beträgt 340 Meter pro Sekunde, was 29 Mikrosekunden pro Zentimeter entspricht. Indem wir die Zeit messen, die eine Rechteckwelle benötigt, um zu einem Hindernis zu gelangen und zurückzukehren, können wir die zurückgelegte Entfernung berechnen, indem wir die Gesamtzeit durch 2 teilen. Dies ergibt die Entfernung des Hindernisses von der Schallquelle.
float distance = microsecond / 29.00 / 2;
Beachten Sie, dass der Ultraschallsensor das Programm während der Arbeit anhält, was bei der Erstellung komplexer Projekte zu Verzögerungen führen kann.