注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.7 サーボの振動
このキットには、LEDやパッシブブザーに加えて、PWM信号で制御されるデバイス、サーボも含まれています。
サーボは、位置(角度)制御が可能なデバイスであり、一定の角度変更が必要な制御システムに適しています。高級リモコン玩具、例えば飛行機、潜水艦モデル、リモコンロボットなどで広く利用されています。
それでは、サーボを振動させてみましょう!
必要なコンポーネント
このプロジェクトには以下のコンポーネントが必要です。
一式をまとめて購入するのは非常に便利です。リンクはこちら:
名称 |
このキットに含まれるアイテム |
リンク |
|---|---|---|
ケプラーキット |
450+ |
以下のリンクから個別に購入することもできます。
SN |
コンポーネント |
個数 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
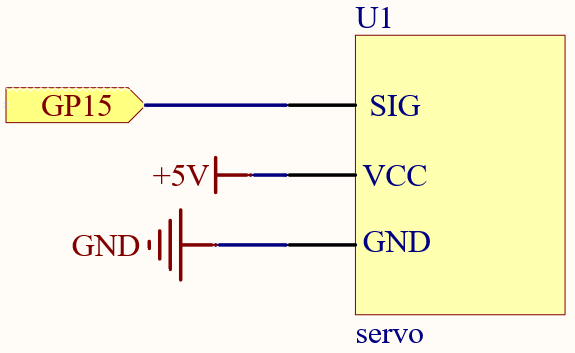
回路図
配線
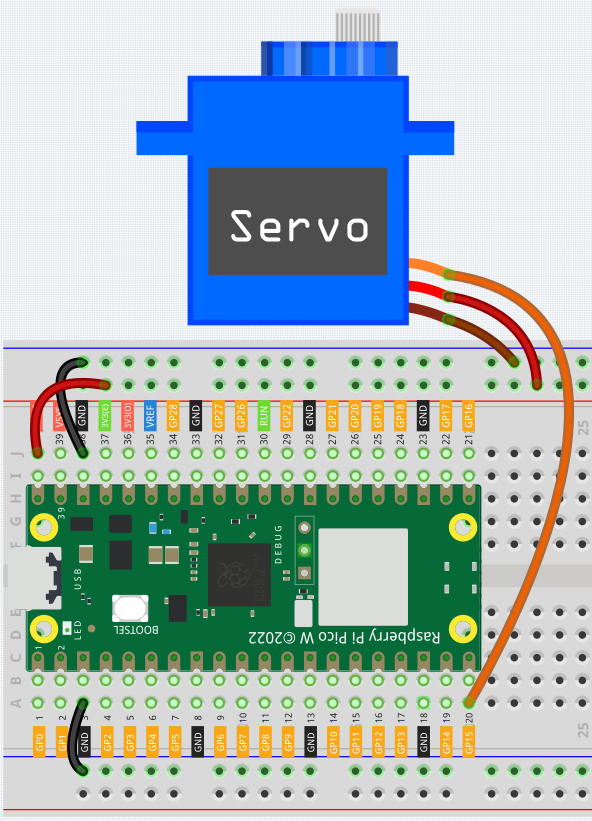
オレンジ色のワイヤーは信号で、GP15に接続されています。
赤色のワイヤーはVCCで、VBUS(5V)に接続されています。
茶色のワイヤーはGNDで、GNDに接続されています。
コード
注釈
kepler-kit-main/micropythonのパス下にある3.7_swinging_servo.pyファイルを開くか、このコードをThonnyにコピペして、「Run Current Script」をクリックまたはF5キーを押して実行します。右下角にある「MicroPython(Raspberry Pi Pico)」インタープリターをクリックして選択してください。
詳細なチュートリアルは、 コードを直接開いて実行する を参照してください。
import machine
import utime
servo = machine.PWM(machine.Pin(15))
servo.freq(50)
def interval_mapping(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
def servo_write(pin, angle):
pulse_width = interval_mapping(angle, 0, 180, 0.5, 2.5)
duty = int(interval_mapping(pulse_width, 0, 20, 0, 65535))
pin.duty_u16(duty)
while True:
for angle in range(180):
servo_write(servo, angle)
utime.sleep_ms(20)
for angle in range(180, -1, -1):
servo_write(servo, angle)
utime.sleep_ms(20)
プログラムが実行中のとき、サーボアームが0°から180°まで前後に振動するのが見えます。
while True ループによってプログラムは絶えず動作していますので、プログラムを終了するにはStopボタンを押す必要があります。
動作原理は?
サーボを動かすために servo_write() 関数を定義しました。
この関数には二つのパラメーターがあります:
pin、サーボを制御するGPIOピン。Angle、軸の出力角度。
この関数内で、 interval_mapping() が呼び出され、角度範囲0~180をパルス幅範囲0.5~2.5msにマッピングします。
pulse_width = interval_mapping(angle, 0, 180, 0.5, 2.5)
なぜ0.5~2.5なのか?これはサーボの動作モードによって決定されます。
次に、パルス幅を周期からデューティに変換します。 duty_u16() は小数点を持つことができない(値は浮動小数点型であってはならない)ので、 int() を用いてデューティを整数型に強制変換します。
duty = int(interval_mapping(pulse_width, 0, 20, 0, 65535))
最後に、デューティ値を duty_u16() に書き込みます。