注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.8 やさしく押して
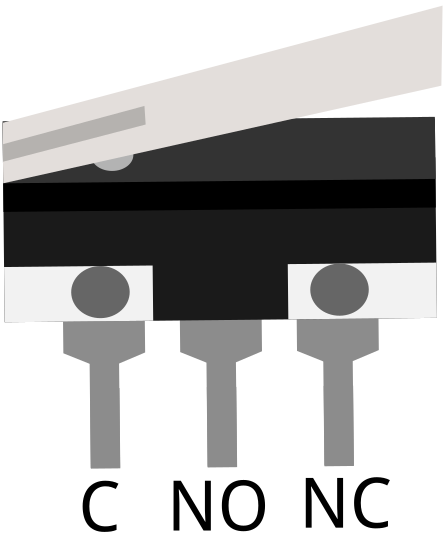
マイクロスイッチもまた3ピンのデバイスで、この3ピンの順序はC(共通ピン)、NO(通常開)およびNC(通常閉)です。
マイクロスイッチが押されていない場合、1(C)と3(NC)が接続され、押された場合は、1(C)と2(NO)が接続されます。
必要な部品
このプロジェクトでは、以下の部品が必要です。
全ての部品が含まれるキットを購入するのは確かに便利です、リンクはこちら:
名前 |
このキットに含まれるアイテム |
リンク |
|---|---|---|
ケプラーキット |
450以上 |
以下のリンクから部品を個別に購入することもできます。
項番 |
部品 |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
マイクロUSBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1(10KΩ) |
||
6 |
1(104) |
||
7 |
1 |
回路図
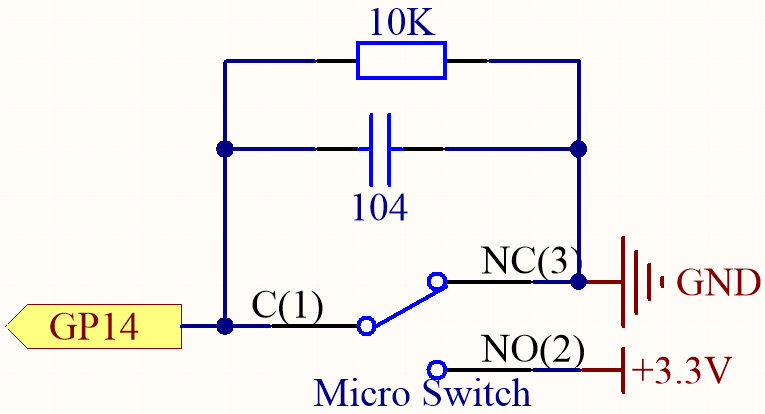
デフォルトでは、GP14はローで、押されるとGP14はハイになります。
10Kの抵抗器の目的は、押している間にGP14を低く保つことです。
104セラミックキャパシターは、ジッターを除去するためにここで使用されます。
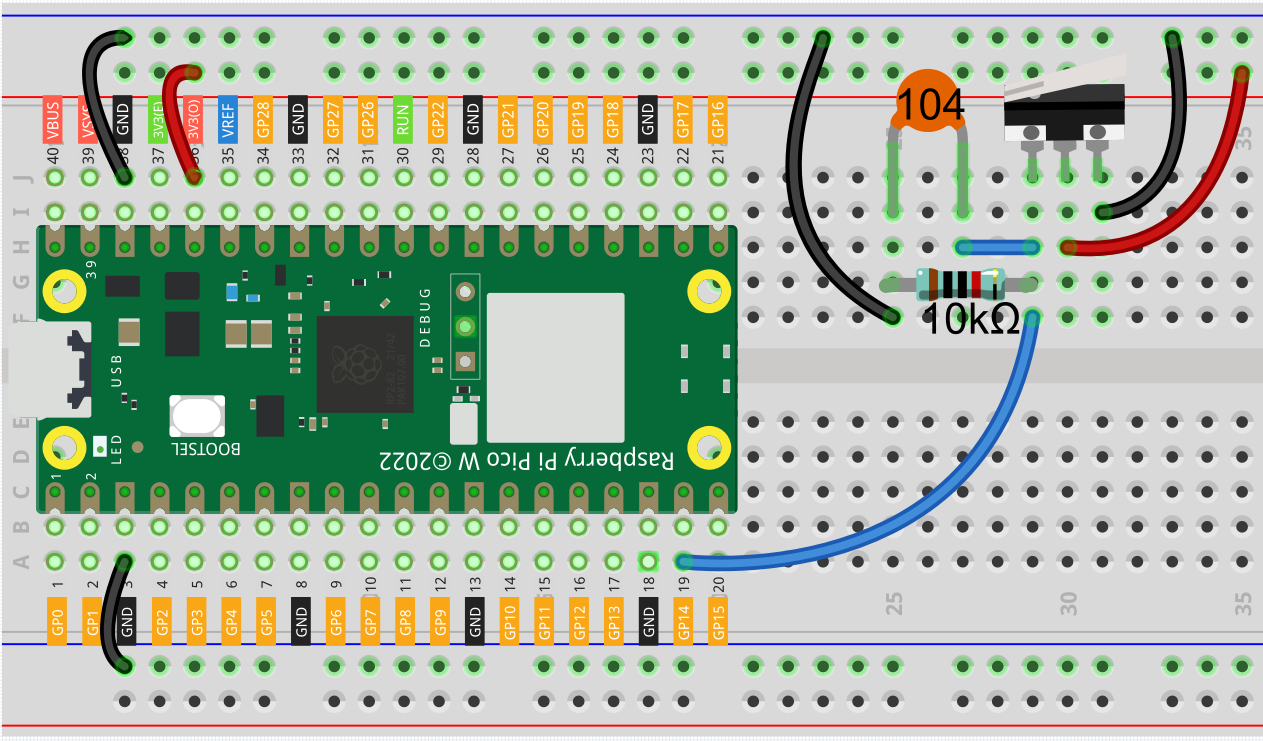
配線
コード
注釈
kepler-kit-main/micropythonパス下の2.8_micro_switch.pyファイルを開くか、このコードをThonnyにコピーして、「Run Current Script」をクリックするか、単にF5キーを押して実行してください。画面の右下隅にある "MicroPython (Raspberry Pi Pico)" インタープリタをクリックするのを忘れないでください。
詳細なチュートリアルは、 コードを直接開いて実行する を参照してください。
import machine
import utime
button = machine.Pin(14, machine.Pin.IN)
while True:
if button.value() == 1:
print("The switch works!")
utime.sleep(1)
プログラムが実行された後、スライドスイッチを右に切り替えると、シェルに「The switch works!」と表示されます。