注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
6.3 6軸モーショントラッキング
MPU-6050は6軸(3軸ジャイロスコープ、3軸加速度計)のモーショントラッキングデバイスです。
加速度計は、適切な加速度を測定するツールです。例えば、地球上で静止している加速度計は、地球の重力による上向きの加速度[3](定義上)を約9.81 m/s²として測定します。
加速度計は、産業や科学で多くの用途があります。例としては、航空機やミサイルの慣性航法システム、タブレットやデジタルカメラの画像を縦に保つためなどがあります。
ジャイロスコープは、デバイスまたは機器の方向と角速度を測定するために使用されます。 ジャイロスコープの応用例としては、自動車の反転防止とエアバッグシステム、スマートデバイスのモーションセンシングシステム、ドローンの姿勢安定化システムなどがあります。
必要な部品
このプロジェクトには、以下の部品が必要です。
全てを一つのキットで購入するのも便利です、リンクはこちら:
名前 |
このキットに含まれるアイテム |
リンク |
|---|---|---|
ケプラーキット |
450以上 |
もちろん、以下のリンクから個々の部品を購入することもできます。
項番 |
部品 |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
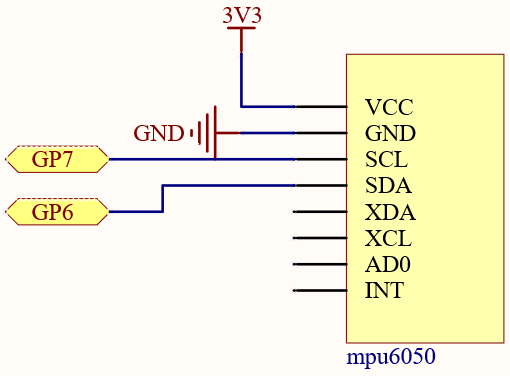
回路図
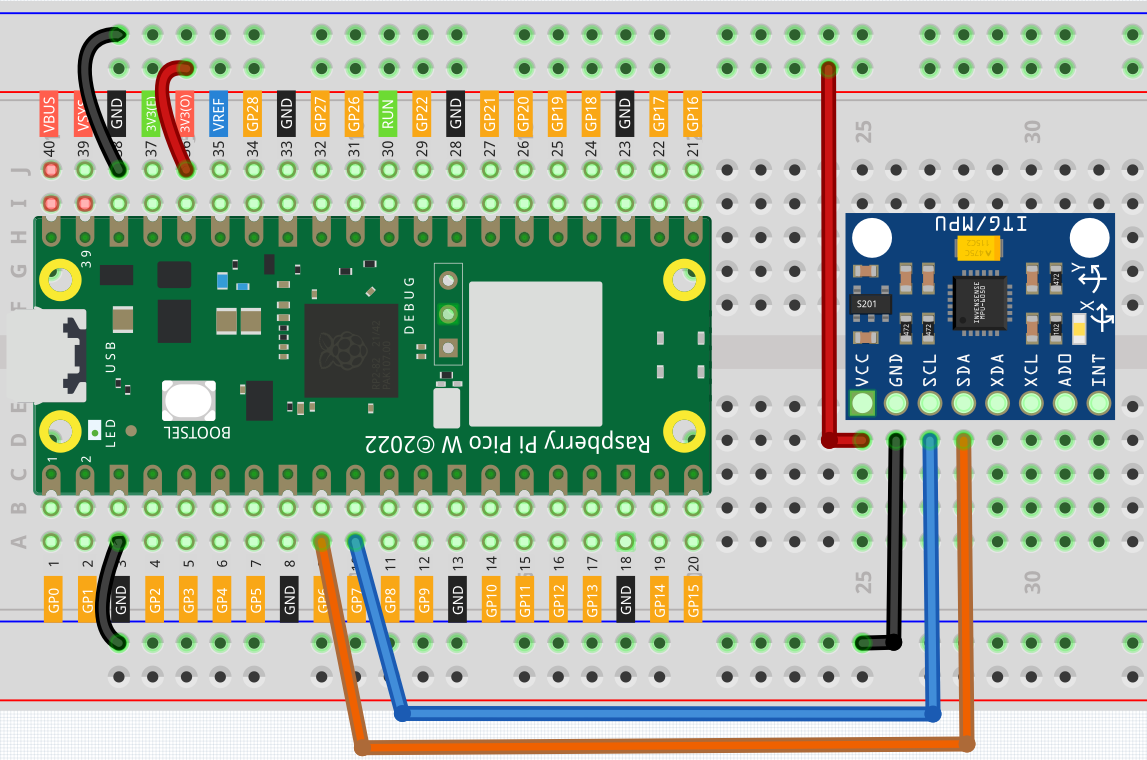
配線
コード
注釈
kepler-kit-main/micropythonパス下の6.3_6axis_motion_tracking.pyファイルを開くか、このコードをThonnyにコピーして、「Run Current Script」をクリックするか、単にF5キーを押して実行してください。画面の右下隅にある "MicroPython (Raspberry Pi Pico)" インタープリタをクリックするのを忘れないでください。
詳細なチュートリアルは、 コードを直接開いて実行する を参照してください。
このプロジェクトでは
imu.pyとvector3d.pyが必要です。Pico Wにアップロードされているか確認してください。詳細なチュートリアルは 1.4 Picoにライブラリをアップロード を参照してください。
from imu import MPU6050
from machine import I2C, Pin
import time
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
mpu = MPU6050(i2c)
while True:
print("x: %s, y: %s, z: %s"%(mpu.accel.x, mpu.accel.y, mpu.accel.z))
time.sleep(0.5)
print("A: %s, B: %s, Y: %s"%(mpu.gyro.x, mpu.gyro.y, mpu.gyro.z))
time.sleep(0.5)
プログラムを実行すると、3軸加速度計の値と3軸ジャイロスコープの値が出力で循環します。 この時点でMPU6050を自由に回転させると、これらの値もそれに応じて変わるでしょう。 変更を容易に確認するために、print文の一つをコメントアウトして、他のデータセットに集中することもできます。
加速度計の値の単位は「m/s²」、ジャイロスコープの値の単位は「°/s」です。
仕組みは?
imuライブラリでは、関連する関数を MPU6050 クラスに統合しています。
MPU6050はI2Cモジュールであり、初期化のためにI2Cピンのセットを定義する必要があります。
from imu import MPU6050
from machine import I2C, Pin
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
mpu = MPU6050(i2c)
その後、 mpu.accel.x 、 mpu.accel.y 、 mpu.accel.z 、 mpu.gyro.x 、 mpu.gyro.y 、 mpu.gyro.z でリアルタイムの加速度と角速度の値を取得できます。
while True:
print("x: %s, y: %s, z: %s"%(mpu.accel.x, mpu.accel.y, mpu.accel.z))
time.sleep(0.5)
print("A: %s, B: %s, Y: %s"%(mpu.gyro.x, mpu.gyro.y, mpu.gyro.z))
time.sleep(0.5)