注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.10 人間の動きを検出
受動型赤外線センサー(PIRセンサー)は、視野内の物体が放出する赤外線(IR)光を測定できる一般的なセンサーです。 簡単に言えば、体から放出される赤外線を受け取り、人や他の動物の動きを検出します。 具体的には、誰かが部屋に入ったとメインコントロールボードに通知します。
必要なコンポーネント
このプロジェクトで必要なコンポーネントは以下のとおりです。
全体のキットを購入する方が確実に便利です、リンクはこちら:
名前 |
このキットに含まれるアイテム |
リンク |
|---|---|---|
ケプラーキット |
450以上 |
以下のリンクから個々に購入することもできます。
S/N |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
回路図
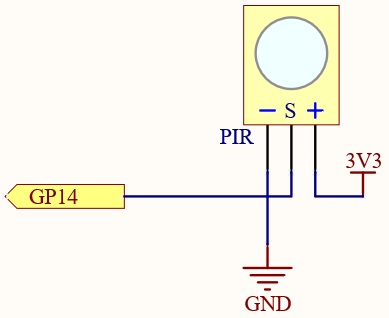
PIRモジュールが通過する人を検出すると、GP14は高くなり、それ以外の場合は低くなります。
注釈
PIRモジュールには二つの可変抵抗があります:一つは感度を調整し、もう一つは検出距離を調整します。PIRモジュールをより効果的に動作させるには、両方を反時計回りに最後まで回してください。

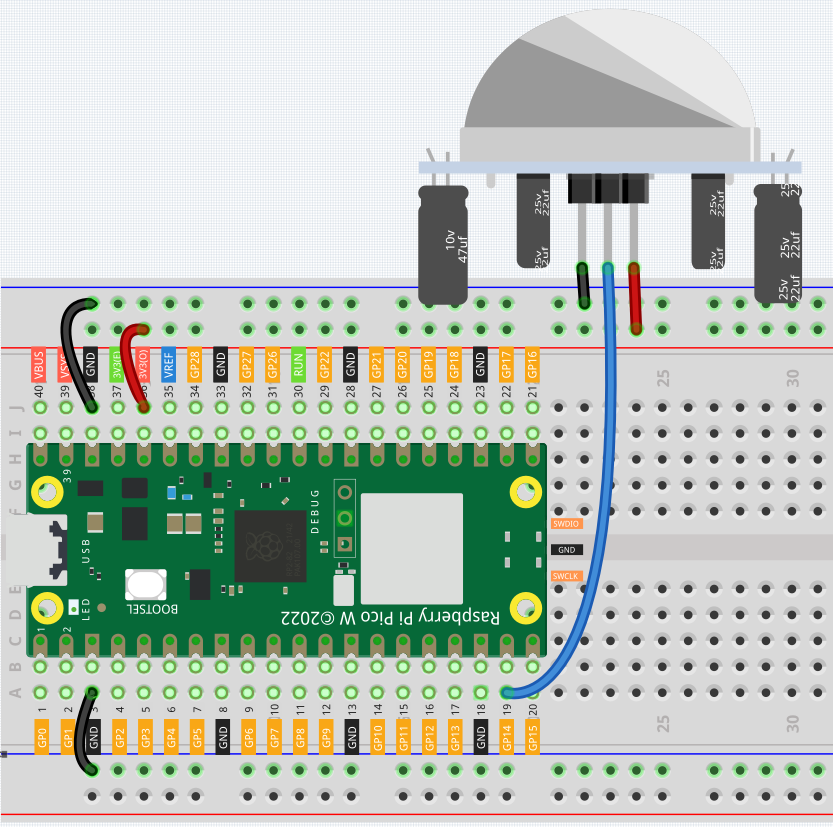
配線
コード
注釈
kepler-kit-main/micropythonのパス下の2.10_detect_human_movement.pyファイルを開くか、このコードをThonnyにコピーして、"Run Current Script"をクリックするかF5を押して実行してください。右下隅の"MicroPython(Raspberry Pi Pico)"インタプリターをクリックするのを忘れないでください。
詳細なチュートリアルについては、 コードを直接開いて実行する を参照してください。
import machine
import utime
pir_sensor = machine.Pin(14, machine.Pin.IN)
def motion_detected(pin):
print("Somebody here!")
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=motion_detected)
プログラムが実行された後、PIRモジュールが近くに誰かを検出すると、シェルに「Somebody here!」と表示されます。
もっと詳しく
PIRは非常に敏感なセンサーです。使用環境に適応させるために調整が必要です。2つの可変抵抗がある側を向けて、両方の可変抵抗を反時計回りに最後まで回し、Lと中央のピンにジャンパーキャップを挿入してください。
注釈
kepler-kit-main/micropythonのパス下の2.10_pir_adjustment.pyファイルを開くか、このコードをThonnyにコピーして、"Run Current Script"をクリックするかF5を押して実行してください。右下隅の"MicroPython(Raspberry Pi Pico)"インタプリターをクリックするのを忘れないでください。
詳細なチュートリアルについては、 コードを直接開いて実行する を参照してください。
import machine
import utime
pir_sensor = machine.Pin(14, machine.Pin.IN)
global timer_delay
timer_delay = utime.ticks_ms()
print("start")
def pir_in_high_level(pin):
global timer_delay
pir_sensor.irq(trigger=machine.Pin.IRQ_FALLING, handler=pir_in_low_level)
intervals = utime.ticks_diff(utime.ticks_ms(), timer_delay)
timer_delay = utime.ticks_ms()
print("the dormancy duration is " + str(intervals) + "ms")
def pir_in_low_level(pin):
global timer_delay
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=pir_in_high_level)
intervals2 = utime.ticks_diff(utime.ticks_ms(), timer_delay)
timer_delay = utime.ticks_ms()
print("the duration of work is " + str(intervals2) + "ms")
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=pir_in_high_level)
調整方法と実験結果を一緒に解析しましょう。
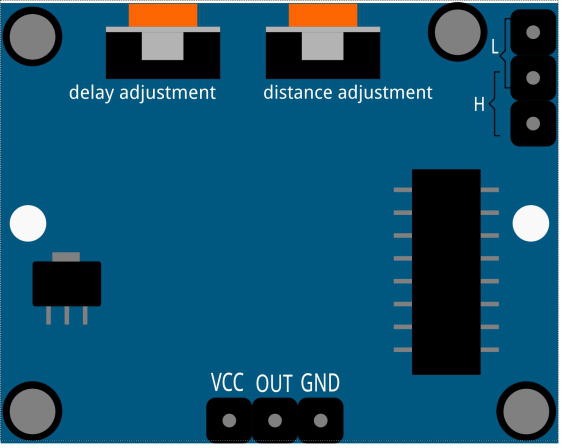
トリガーモード
コーナーのジャンパーキャップがあるピンを見てみましょう。 それによってPIRは、リピート可能なトリガーモードまたは非リピート可能なトリガーモードに入ります。
現在、ジャンパーキャップは中央のピンとLピンを接続しており、PIRは非リピート可能なトリガーモードになっています。 このモードでは、PIRが生体の動きを検出すると、約2.8秒間メインコントロールボードに高レベルの信号を送信します。 印刷されたデータで見ると、作業の継続時間は常に約2800ms前後になります。
次に、下のジャンパーキャップの位置を変更して、中央のピンとHピンを接続し、PIRをリピート可能なトリガーモードにします。 このモードでは、PIRが生体の動きを検出する(センサーの前で静止しているのではなく、動いていることに注意)と、生体が検出範囲内で動き続ける限り、PIRはメインコントロールボードに高レベルの信号を送り続けます。 印刷されたデータで見ると、作業の継続時間は不確かな値になります。
遅延調整
左側の可変抵抗は、二つの作業の間隔を調整するために使用されます。
現在、反時計回りに最後まで回してありますので、PIRは高レベルの作業を送信し終えた後、約5秒のスリープ時間が必要です。この期間中、PIRは目標エリアでの赤外線放射を検出しません。 印刷されたデータで見ると、休眠期間は常に5000ms以上になっています。
可変抵抗を時計回りに回すと、スリープ時間も増加します。それを時計回りに最後まで回すと、スリープ時間は最大で300秒になります。
距離調整
中央の可変抵抗は、PIRの感知距離範囲を調整するために使用されます。
距離調整の可変抵抗のノブを 時計回り に回すと、感知距離範囲が増加し、最大感知距離範囲は約0-7メートルです。 反時計回り に回すと、感知距離範囲が減少し、最小感知距離範囲は約0-3メートルです。