Nota
Ciao, benvenuto nella Community Facebook di appassionati di SunFounder Raspberry Pi & Arduino & ESP32! Approfondisci Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni l’accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
4.1.13 Monitor di Surriscaldamento (MCP3008)
Nota
A seconda della versione del tuo kit, identifica se hai ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
Potresti voler realizzare un dispositivo di monitoraggio del surriscaldamento applicabile a varie situazioni, ad esempio in fabbrica, per attivare un allarme e spegnere automaticamente la macchina quando si verifica un surriscaldamento di un circuito. In questo progetto useremo termistore, joystick, buzzer, LED e LCD per realizzare un dispositivo intelligente di monitoraggio della temperatura con soglia regolabile.
Componenti richiesti
In questo progetto, abbiamo bisogno dei seguenti componenti.
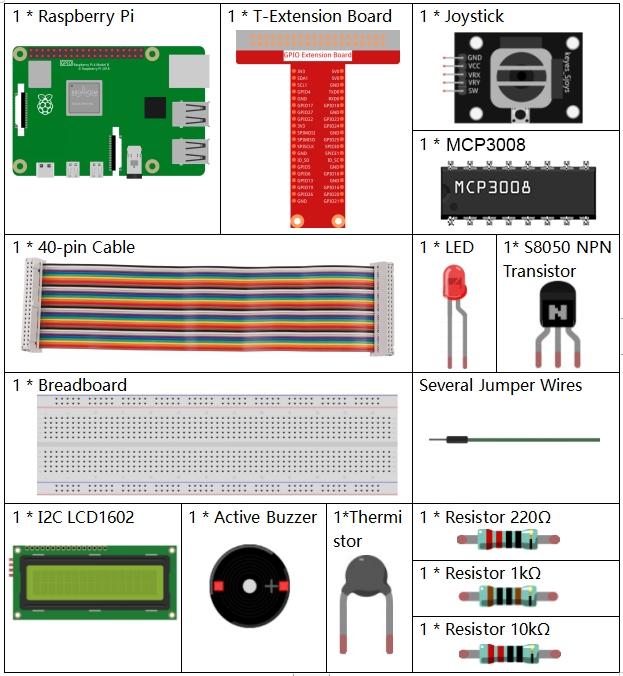
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ARTICOLI IN QUESTO KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE COMPONENTE |
LINK DI ACQUISTO |
|---|---|
- |
|
- |
|
- |
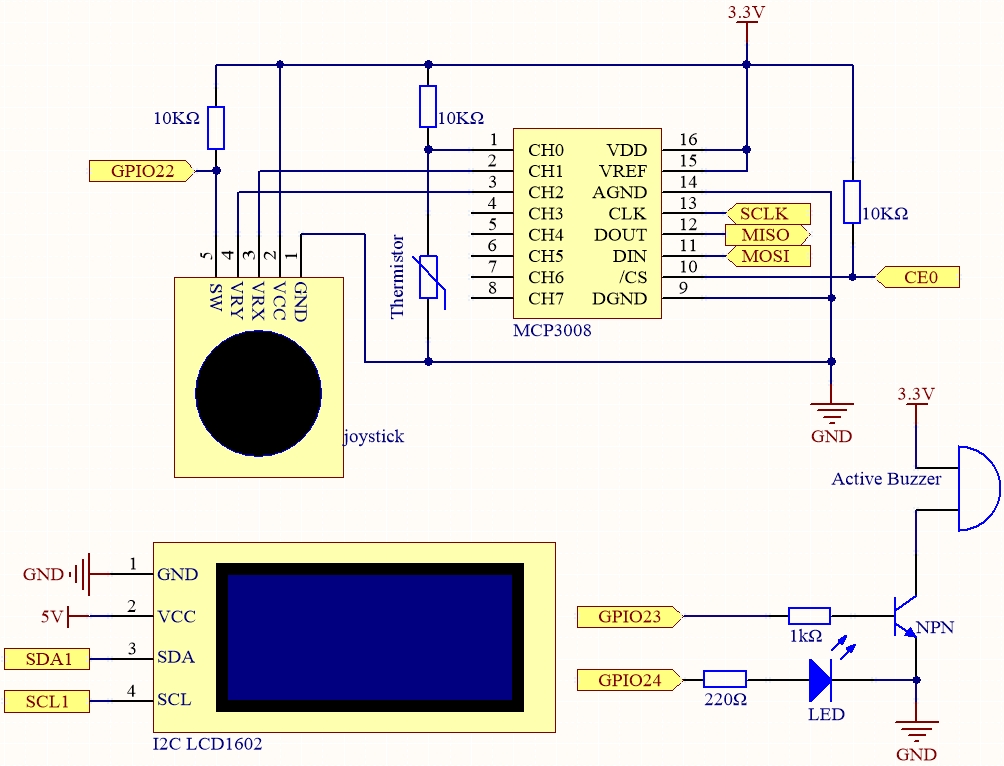
Schema elettrico
Nome T-Board |
fisico |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Procedure sperimentali
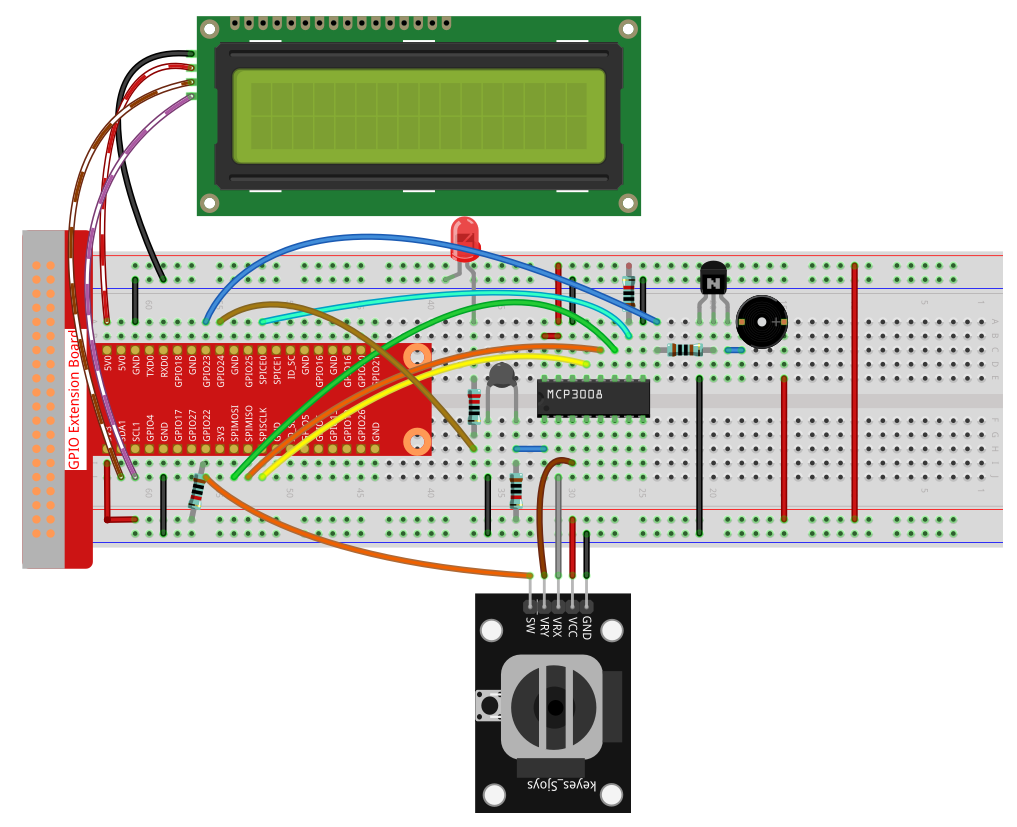
Passo 1: Costruisci il circuito.
Passo 2: Configura l’interfaccia SPI e installa la libreria spidev (vedi Configurazione SPI per istruzioni dettagliate).
Se hai già completato questi passaggi, puoi saltarli.
Passo 3: Vai nella cartella del codice.
cd ~/raphael-kit/python
Passo 4: Esegui il file eseguibile.
sudo python3 4.1.13-2_OverheatMonitor.py
Quando il codice è in esecuzione, la temperatura attuale e la soglia di alta temperatura 40 vengono visualizzate su I2C LCD1602. Se la temperatura corrente è superiore alla soglia, il buzzer e il LED vengono attivati per avvisarti.
Il Joystick serve per regolare la soglia di temperatura elevata. Spostando il Joystick lungo l’asse X e Y è possibile aumentare o diminuire la soglia corrente. Premendo nuovamente il Joystick si ripristina la soglia al valore iniziale.
Nota
Se ricevi l’errore
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', fai riferimento a Configurazione I²C per abilitare l’I2C.Se ricevi l’errore
ModuleNotFoundError: No module named 'smbus2', eseguisudo apt install python3-smbus2.Se appare l’errore
OSError: [Errno 121] Remote I/O error, significa che il modulo è collegato male o guasto.Se il codice e i collegamenti sono corretti ma l’LCD non mostra contenuti, ruota il potenziometro sul retro per aumentare il contrasto.
Avvertimento
Se compare il messaggio di errore RuntimeError: Cannot determine SOC peripheral base address, fai riferimento a If gpiozero doesn’t work.
Codice
Nota
Puoi Modificare/Resettare/Copiare/Eseguire/Fermare il codice qui sotto.
Prima però devi andare nel percorso del codice sorgente come raphael-kit/python.
Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
import LCD1602
# Pin GPIO
JOY_BTN_PIN = 22 # Pulsante joystick
BUZZER_PIN = 23 # Pin buzzer
LED_PIN = 24 # Pin LED
GPIO.setmode(GPIO.BCM)
GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(BUZZER_PIN, GPIO.OUT)
GPIO.setup(LED_PIN, GPIO.OUT)
upperTem = 40
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
LCD1602.init(0x27, 1)
def read_adc(channel):
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
if Vr == 0:
return 0
Rt = 10000.0 * (3.3 - Vr) / Vr
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
Cel = tempK - 273.15
return round(Cel, 2)
def monitoring_temp():
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
GPIO.output(BUZZER_PIN, GPIO.HIGH)
GPIO.output(LED_PIN, GPIO.HIGH)
else:
GPIO.output(BUZZER_PIN, GPIO.LOW)
GPIO.output(LED_PIN, GPIO.LOW)
try:
lastState = GPIO.input(JOY_BTN_PIN)
stage = 0
while True:
currentState = GPIO.input(JOY_BTN_PIN)
if currentState == GPIO.HIGH and lastState == GPIO.LOW:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
pass
finally:
LCD1602.clear()
GPIO.cleanup()
spi.close()
Spiegazione del codice
Importazione librerie
Carica le librerie richieste per GPIO, SPI, LCD, gestione del tempo e operazioni matematiche.
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math import LCD1602
Configurazione GPIO e dispositivi
Definisce i pin per joystick, buzzer e LED e imposta la modalità GPIO.
JOY_BTN_PIN = 22 # Button pin BUZZER_PIN = 23 # Buzzer pin LED_PIN = 24 # LED pin GPIO.setmode(GPIO.BCM) GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(BUZZER_PIN, GPIO.OUT) GPIO.setup(LED_PIN, GPIO.OUT)
Inizializzazione SPI e LCD
Avvia l’interfaccia SPI per MCP3008 e inizializza l’LCD1602 con indirizzo I2C 0x27.
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
Funzione lettura ADC
Legge valori analogici da MCP3008 (0–7).
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Rilevamento movimento joystick
Controlla gli assi X/Y del joystick e restituisce un valore per modificare la soglia.
def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
Impostazione soglia
Mostra “Upper Adjust” su LCD e aggiorna la soglia in base al joystick.
def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
Calcolo temperatura
Converte la lettura analogica in tensione, resistenza e poi temperatura (°C) con l’equazione Steinhart–Hart.
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 if Vr == 0: return 0 Rt = 10000.0 * (3.3 - Vr) / Vr tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return round(Cel, 2)
Monitoraggio temperatura
Visualizza temperatura e soglia; attiva buzzer e LED se si supera la soglia.
def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: GPIO.output(BUZZER_PIN, GPIO.HIGH) GPIO.output(LED_PIN, GPIO.HIGH) else: GPIO.output(BUZZER_PIN, GPIO.LOW) GPIO.output(LED_PIN, GPIO.LOW)
Logica principale
Alterna tra modalità monitoraggio e modalità impostazione soglia premendo il joystick.
try: lastState = GPIO.input(JOY_BTN_PIN) stage = 0 while True: currentState = GPIO.input(JOY_BTN_PIN) if currentState == GPIO.HIGH and lastState == GPIO.LOW: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
Pulizia in uscita
Spegne correttamente GPIO, LCD e SPI alla chiusura del programma.
except KeyboardInterrupt: pass finally: LCD1602.clear() GPIO.cleanup() spi.close()