Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime speciali.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a concorsi e promozioni durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
4.1.9 Allarme di Retromarcia
Introduzione
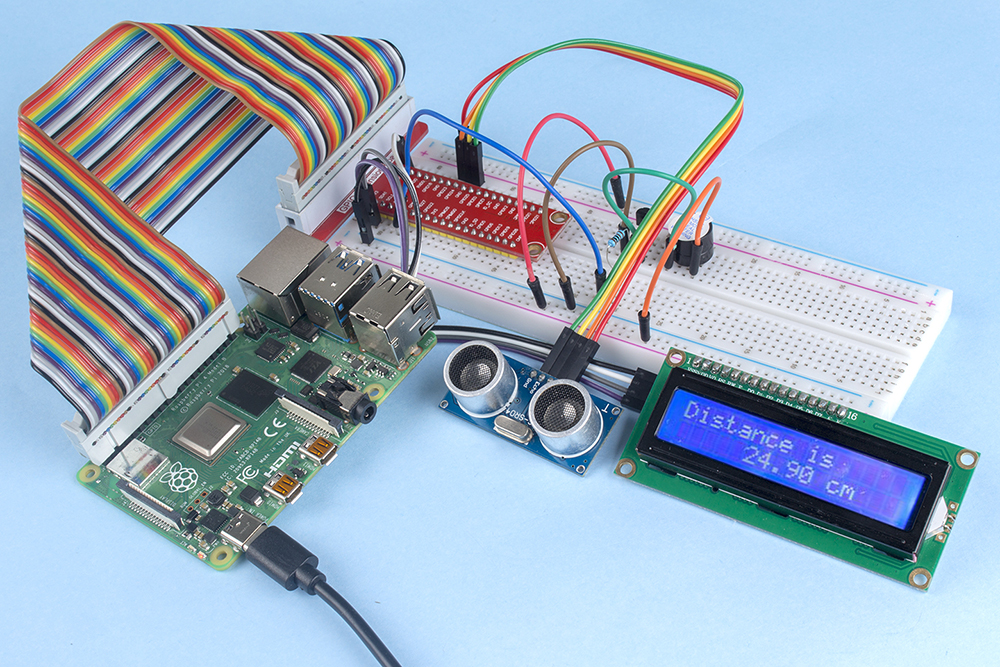
In questo progetto, utilizzeremo un display LCD, un buzzer e sensori a ultrasuoni per creare un sistema di assistenza alla retromarcia. Possiamo posizionarlo su un’auto telecomandata per simulare il processo reale di retromarcia in un garage.
Componenti necessari
In questo progetto, avremo bisogno dei seguenti componenti.
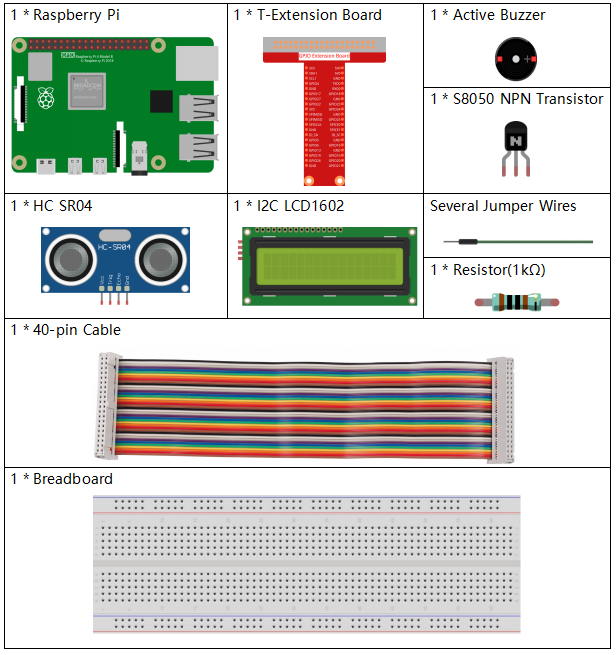
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
- |
|
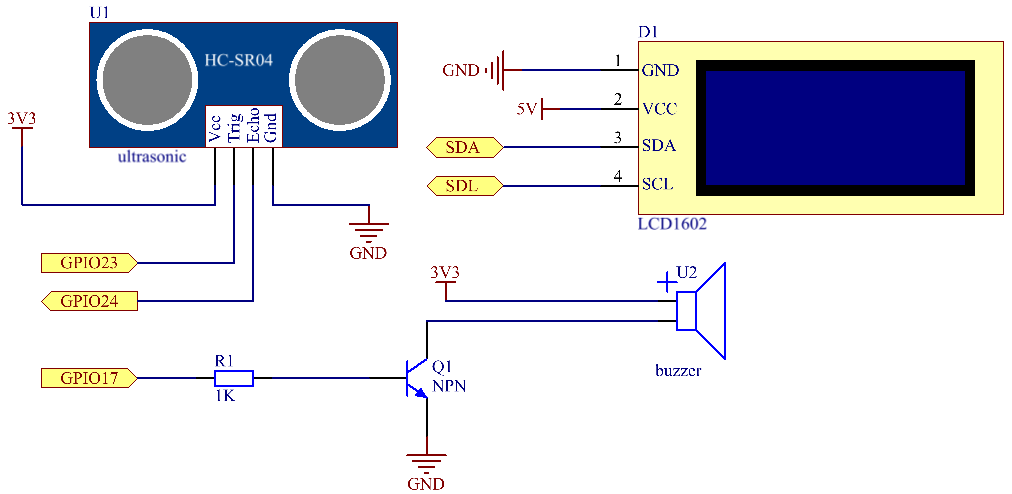
Schema elettrico
Il sensore a ultrasuoni rileva la distanza tra sé stesso e l’ostacolo, che viene visualizzata sul display LCD sotto forma di codice. Allo stesso tempo, il sensore a ultrasuoni fa emettere al buzzer un segnale acustico la cui frequenza varia in base alla distanza rilevata.
T-Board Name |
physical |
wiringPi |
BCM |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO17 |
Pin 11 |
0 |
17 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
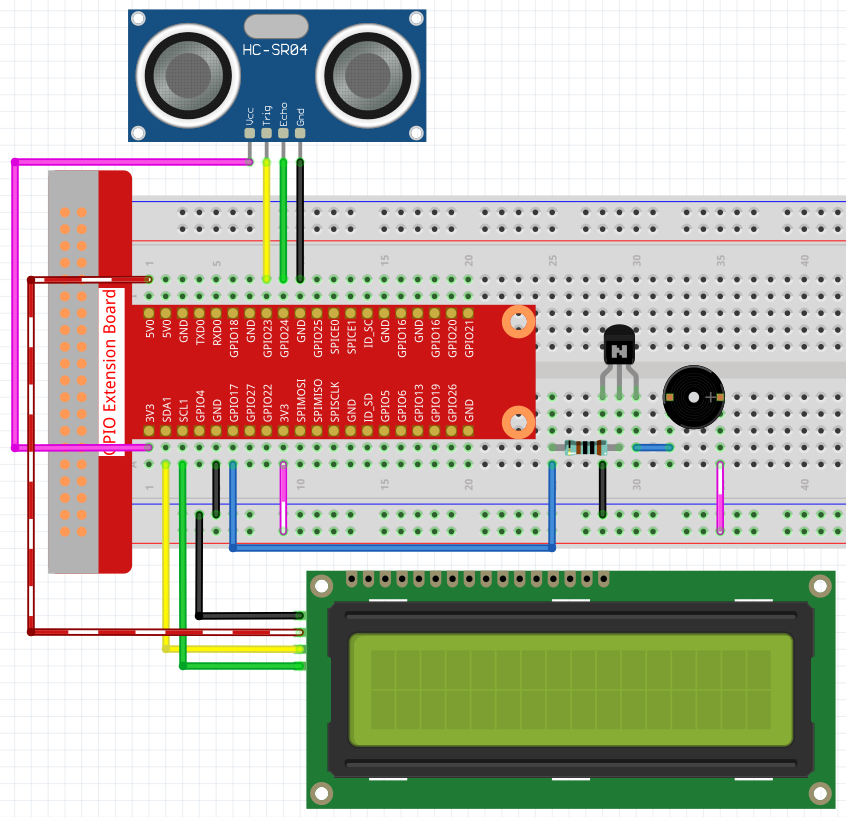
Procedure sperimentali
Passo 1: Costruisci il circuito.
Passo 2: Cambia directory.
cd ~/raphael-kit/python/
Passo 3: Esegui.
sudo python3 4.1.9_ReversingAlarm.py
Una volta eseguito il codice, il modulo sensore a ultrasuoni rileverà la distanza dall’ostacolo e visualizzerà l’informazione sul display LCD1602. Inoltre, il buzzer emetterà un segnale acustico di avvertimento la cui frequenza cambierà in base alla distanza.
Nota
Se compare l’errore
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', devi fare riferimento a Configurazione I²C per abilitare l’I2C.Se compare l’errore
ModuleNotFoundError: No module named 'smbus2', esegui il comandosudo apt install python3-smbus2.Se compare l’errore
OSError: [Errno 121] Remote I/O error, significa che il modulo è cablato male o danneggiato.Se il codice e i collegamenti sono corretti ma il display LCD non mostra nulla, puoi regolare il contrasto ruotando il potenziometro sul retro del modulo.
Codice
Nota
Puoi Modificare/Resettare/Copiare/Eseguire/Fermare il codice qui sotto. Ma prima di farlo, devi accedere al percorso del codice sorgente come raphael-kit/python. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
import LCD1602
import time
import RPi.GPIO as GPIO
TRIG = 16
ECHO = 18
BUZZER = 11
def lcdsetup():
LCD1602.init(0x27, 1) # init(indirizzo slave, retroilluminazione)
LCD1602.clear()
LCD1602.write(0, 0, 'Ultrasonic Starting')
LCD1602.write(1, 1, 'By SunFounder')
time.sleep(2)
def setup():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
GPIO.setup(BUZZER, GPIO.OUT, initial=GPIO.LOW)
lcdsetup()
def distance():
GPIO.output(TRIG, 0)
time.sleep(0.000002)
GPIO.output(TRIG, 1)
time.sleep(0.00001)
GPIO.output(TRIG, 0)
while GPIO.input(ECHO) == 0:
a = 0
time1 = time.time()
while GPIO.input(ECHO) == 1:
a = 1
time2 = time.time()
during = time2 - time1
return during * 340 / 2 * 100
def destroy():
GPIO.output(BUZZER, GPIO.LOW)
GPIO.cleanup()
LCD1602.clear()
def loop():
while True:
dis = distance()
print (dis, 'cm')
print ('')
GPIO.output(BUZZER, GPIO.LOW)
if (dis > 400):
LCD1602.clear()
LCD1602.write(0, 0, 'Error')
LCD1602.write(3, 1, 'Out of range')
time.sleep(0.5)
else:
LCD1602.clear()
LCD1602.write(0, 0, 'Distance is')
LCD1602.write(5, 1, str(round(dis,2)) +' cm')
if(dis>=50):
time.sleep(0.5)
elif(dis<50 and dis>20):
for i in range(0,2,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.2)
elif(dis<=20):
for i in range(0,5,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.05)
if __name__ == "__main__":
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
Spiegazione del Codice
def lcdsetup():
LCD1602.init(0x27, 1) # init(indirizzo slave, retroilluminazione)
def setup():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
GPIO.setup(BUZZER, GPIO.OUT, initial=GPIO.LOW)
lcdsetup()
In questo programma, utilizziamo componenti già impiegati precedentemente. Qui utilizziamo buzzer, LCD e sensore a ultrasuoni. Li possiamo inizializzare nello stesso modo già visto in precedenza.
dis = distance()
print (dis, 'cm')
print ('')
GPIO.output(BUZZER, GPIO.LOW)
if (dis > 400):
LCD1602.clear()
LCD1602.write(0, 0, 'Error')
LCD1602.write(3, 1, 'Out of range')
time.sleep(0.5)
else:
LCD1602.clear()
LCD1602.write(0, 0, 'Distance is')
LCD1602.write(5, 1, str(round(dis,2)) +' cm')
Qui otteniamo i valori del sensore a ultrasuoni e calcoliamo la distanza. Se la distanza supera l’intervallo rilevabile, un messaggio di errore viene visualizzato sul display LCD. Se la distanza è all’interno dell’intervallo di lavoro, verranno visualizzati i risultati corrispondenti.
LCD1602.write(5, 1, str(round(dis,2)) +' cm')
Poiché l’LCD supporta solo caratteri, dobbiamo usare str() per convertire i valori numerici in stringhe. Applichiamo un arrotondamento a due decimali.
if(dis>=50):
time.sleep(0.5)
elif(dis<50 and dis>20):
for i in range(0,2,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.2)
elif(dis<=20):
for i in range(0,5,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.05)
Questa condizione viene utilizzata per controllare il suono del buzzer. In base alla distanza rilevata, possiamo distinguere tre casi con frequenze sonore diverse. Tutti gli intervalli di ritardo totali sono di 500ms, sufficienti per permettere al sensore a ultrasuoni di funzionare correttamente.
Immagine del fenomeno