Nota
Ciao, benvenuto nella community di appassionati di SunFounder Raspberry Pi, Arduino & ESP32 su Facebook! Approfondisci l’utilizzo di Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché Unirsi?
Supporto Esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara & Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato agli annunci dei nuovi prodotti e anteprime esclusive.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a promozioni e giveaway durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
4.1.15 Campanello d’Allarme
Introduzione
In questo progetto, realizzeremo un dispositivo di allarme manuale. Puoi sostituire l’interruttore a levetta con un termistore o un sensore fotosensibile per creare un allarme temperatura o un allarme luminoso.
Componenti Necessari
Per questo progetto, avremo bisogno dei seguenti componenti.
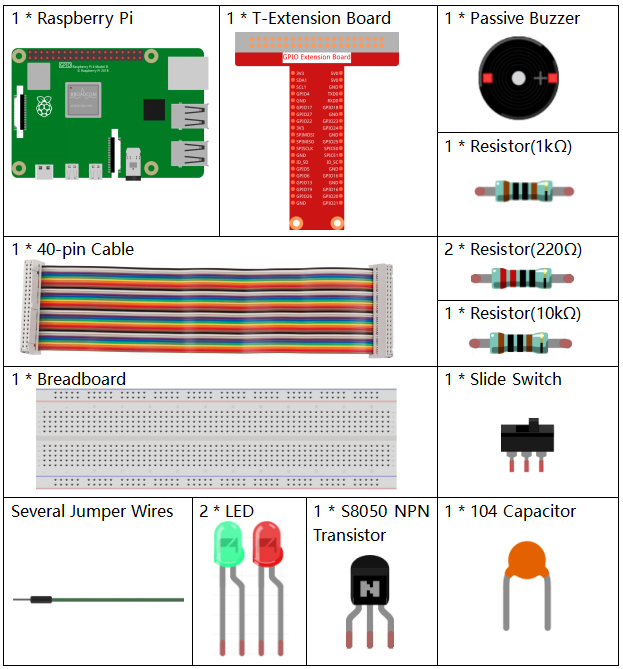
È sicuramente conveniente acquistare un intero kit, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Puoi anche acquistarli separatamente dai link seguenti.
INTRODUZIONE COMPONENTE |
LINK PER L’ACQUISTO |
|---|---|
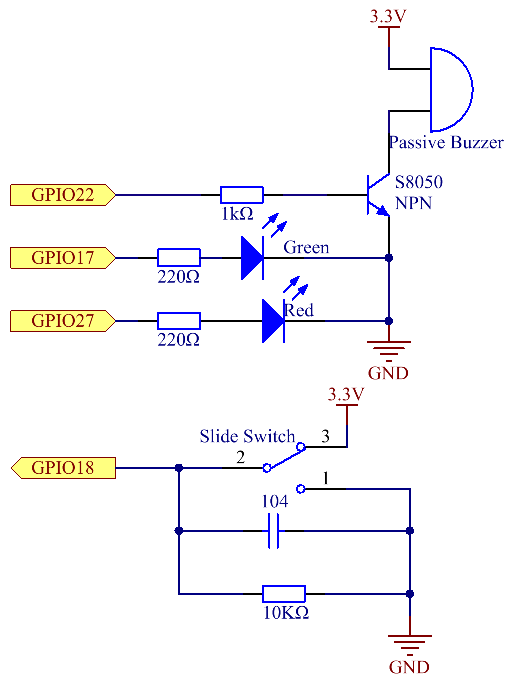
Schema del Circuito
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procedure Sperimentali
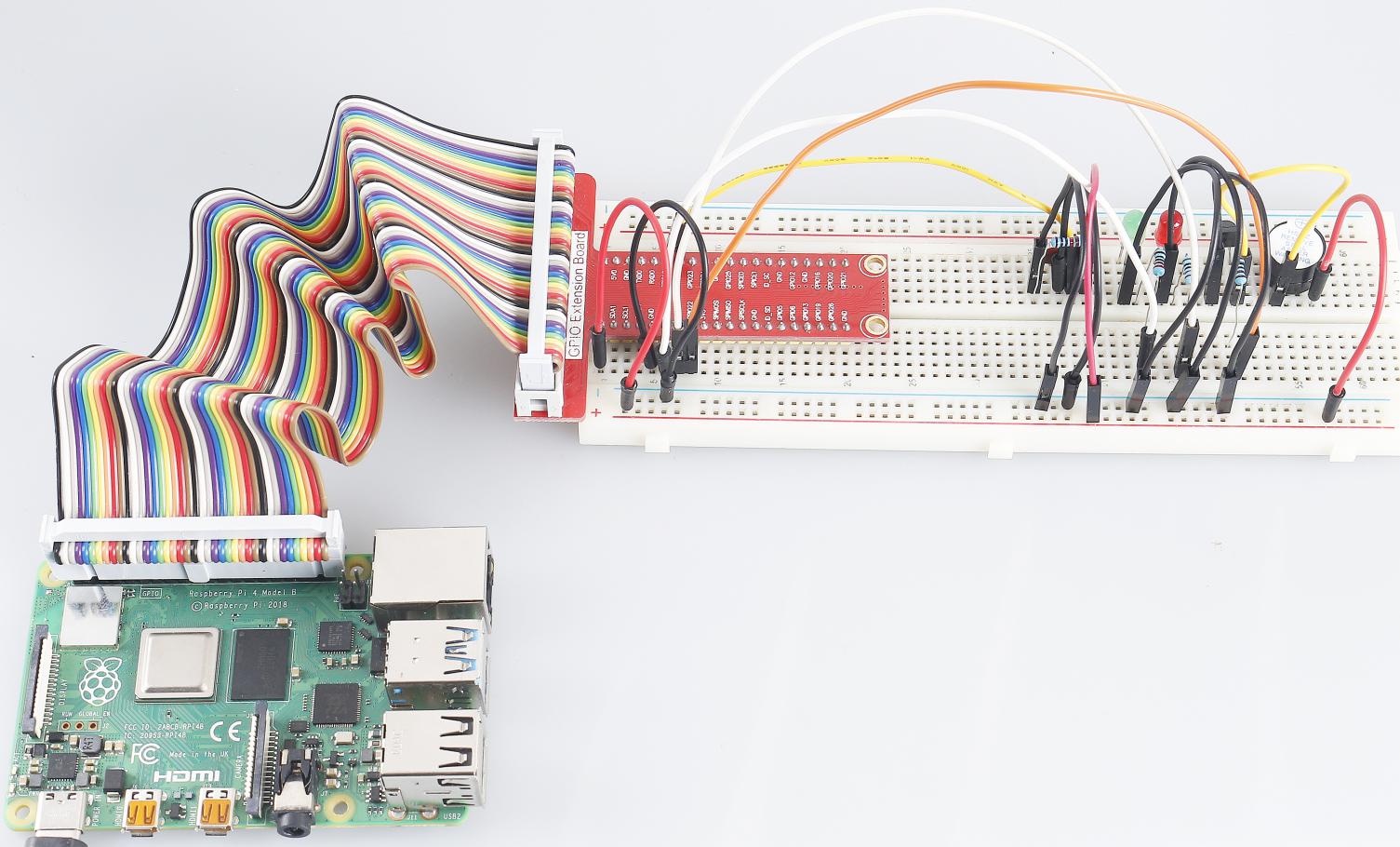
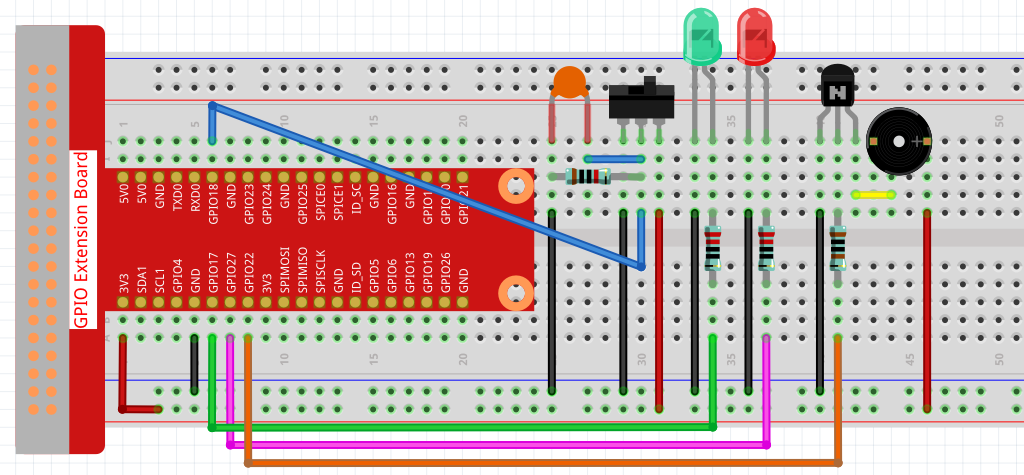
Passo 1: Costruisci il circuito.
Passo 2: Cambia la directory.
cd ~/raphael-kit/python/
Passo 3: Esegui.
sudo python3 4.1.15_AlarmBell.py
Dopo l’avvio del programma, l’interruttore a levetta verrà spostato verso destra, e il cicalino emetterà suoni di allarme. Allo stesso tempo, i LED rosso e verde lampeggeranno a una certa frequenza.
Codice
Nota
Puoi Modificare/Resettare/Copiare/Eseguire/Fermare il codice qui sotto. Ma prima devi accedere al percorso del codice sorgente come raphael-kit/python.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import time
import threading
BeepPin=22
ALedPin=17
BLedPin=27
switchPin=18
Buzz=0
flag =0
note=150
pitch=20
def setup():
GPIO.setmode(GPIO.BCM)
GPIO.setup(BeepPin, GPIO.OUT)
GPIO.setup(ALedPin,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(BLedPin,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(switchPin,GPIO.IN)
global Buzz
Buzz=GPIO.PWM(BeepPin,note)
def ledWork():
while flag:
GPIO.output(ALedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(BLedPin,GPIO.LOW)
def buzzerWork():
global pitch
global note
while flag:
if note >= 800 or note <=130:
pitch = -pitch
note = note + pitch
Buzz.ChangeFrequency(note)
time.sleep(0.01)
def on():
global flag
flag = 1
Buzz.start(50)
tBuzz = threading.Thread(target=buzzerWork)
tBuzz.start()
tLed = threading.Thread(target=ledWork)
tLed.start()
def off():
global flag
flag = 0
Buzz.stop()
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.LOW)
def main():
lastState=0
while True:
currentState =GPIO.input(switchPin)
if currentState == 1 and lastState == 0:
on()
elif currentState == 0 and lastState == 1:
off()
lastState=currentState
def destroy():
off()
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
main()
except KeyboardInterrupt:
destroy()
Spiegazione del Codice
import threading
Qui, importiamo il modulo Threading che ti permette di eseguire più
operazioni contemporaneamente, mentre i programmi normali possono eseguire
il codice solo dall’alto verso il basso. Con il modulo Threading, il
LED e il cicalino possono funzionare separatamente.
def ledWork():
while flag:
GPIO.output(ALedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(BLedPin,GPIO.LOW)
La funzione ledWork() imposta lo stato operativo dei 2 LED:
mantiene acceso il LED verde per 0,5s e poi lo spegne;
allo stesso modo, mantiene acceso il LED rosso per 0,5s e poi lo spegne.
def buzzerWork():
global pitch
global note
while flag:
if note >= 800 or note <=130:
pitch = -pitch
note = note + pitch
Buzz.ChangeFrequency(note)
time.sleep(0.01)
La funzione buzzerWork() è utilizzata per impostare lo stato operativo del cicalino.
Qui impostiamo la frequenza tra 130 e 800, per accumulare o decrescere
a intervalli di 20.
def on():
global flag
flag = 1
Buzz.start(50)
tBuzz = threading.Thread(target=buzzerWork)
tBuzz.start()
tLed = threading.Thread(target=ledWork)
tLed.start()
Nella funzione on() :
Definiamo la variabile
flag=1, che indica l’inizio del controllo del thread.Avviamo il cicalino, impostando il ciclo di lavoro al 50%.
Creiamo 2 thread separati affinché i LED e il cicalino possano funzionare contemporaneamente.
La funzione threading.Thread() viene utilizzata per creare il thread e il suo prototipo è il seguente:
class threading.Thread(group=None, target=None, name=None, args=(), kwargs={}, *, daemon=None)
Tra i metodi di costruzione, il parametro principale è target,
dobbiamo assegnare un oggetto callable (in questo caso le funzioni ledWork
e buzzerWork) al parametro target.
Successivamente, start() viene chiamato per avviare l’oggetto thread, ad esempio, tBuzz.start() avvia il nuovo thread tBuzz.
def off():
global flag
flag = 0
Buzz.stop()
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.LOW)
La funzione off() definisce flag=0 per uscire dai thread
ledWork e buzzerWork e quindi spegnere il cicalino e i LED.
def main():
lastState=0
while True:
currentState =GPIO.input(switchPin)
if currentState == 1 and lastState == 0:
on()
elif currentState == 0 and lastState == 1:
off()
lastState=currentState
main() contiene l’intero processo del programma: innanzitutto legge il
valore dell’interruttore a slitta; se l’interruttore è spostato a destra
(il valore di lettura è 1), viene chiamata la funzione on(), e il cicalino
viene attivato per emettere suoni mentre i LED rosso e verde lampeggiano.
Altrimenti, il cicalino e i LED non funzionano.
Immagine del fenomeno