Nota
¡Hola, bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
4.1.10 Ventilador Inteligente (MCP3008)
Nota
Dependiendo de la versión de tu kit, identifica si tienes ADC0834 o MCP3008 y procede con la sección correspondiente.
Introducción
En este proyecto, utilizaremos motores, botones y termistores para hacer un ventilador inteligente manual + automático cuya velocidad de viento es ajustable.
Componentes requeridos
En este proyecto, necesitamos los siguientes componentes.
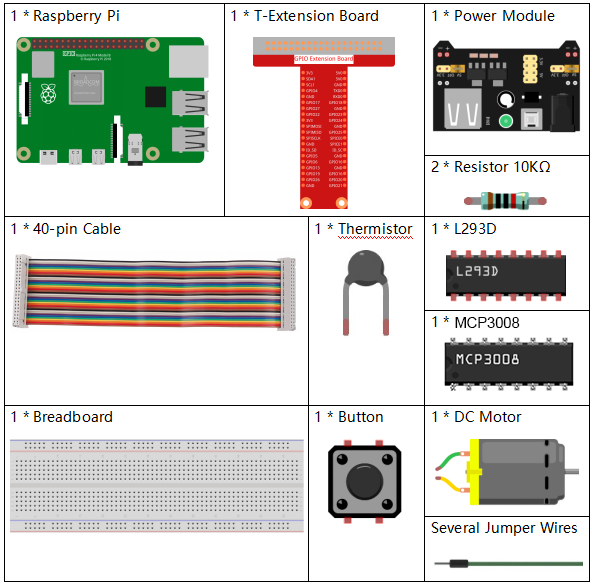
Es definitivamente conveniente comprar un kit completo, aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los siguientes enlaces.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
- |
|
- |
|
- |
|
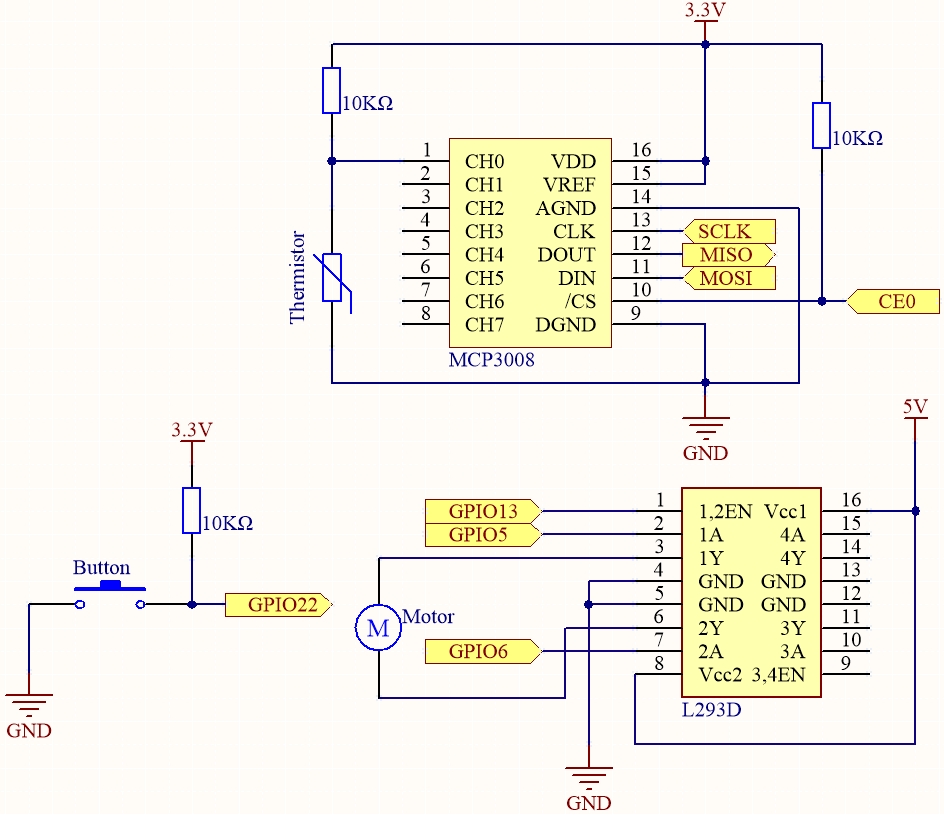
Diagrama esquemático
Nombre |
T-Board |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Procedimientos experimentales
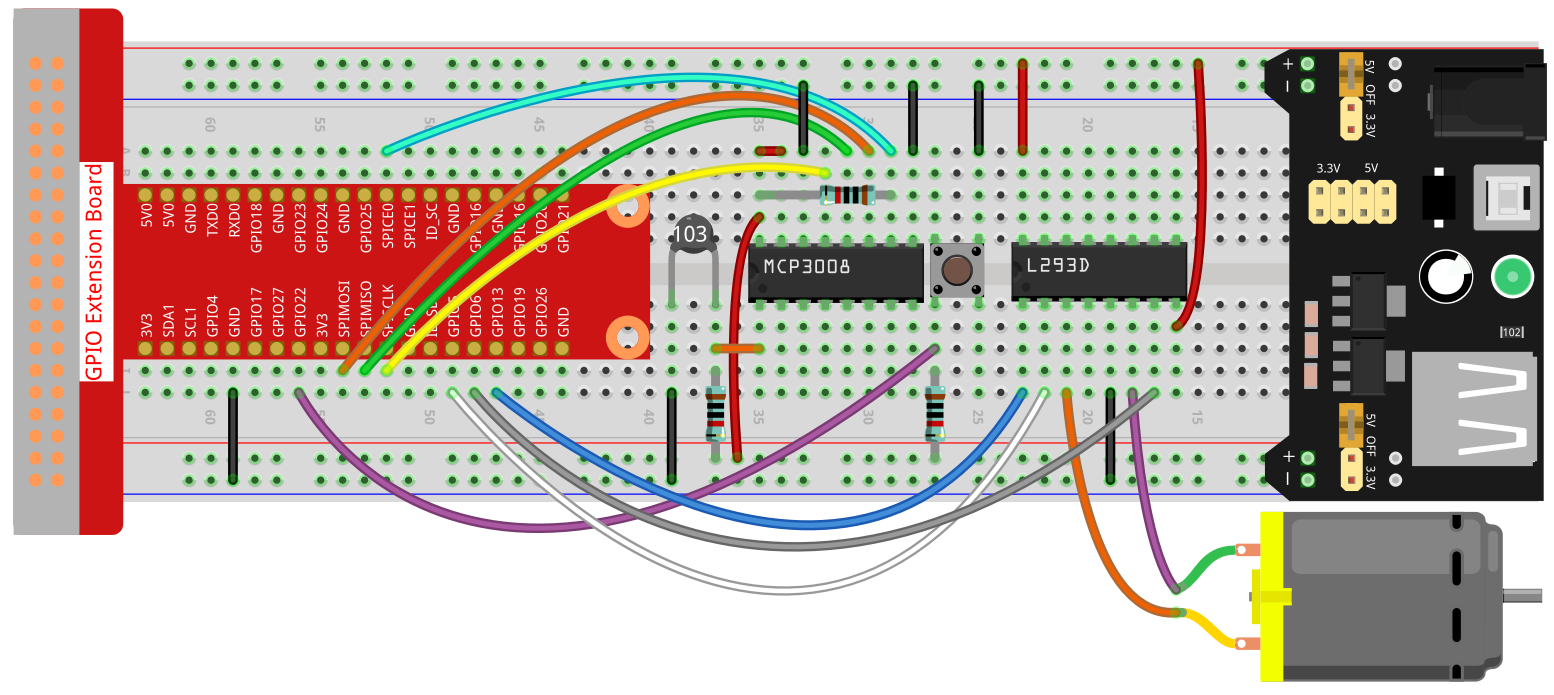
Paso 1: Construir el circuito.
Nota
El módulo de alimentación puede usar una batería de 9V con el conector de batería de 9V incluido en el kit. Inserta el jumper del módulo de alimentación en las líneas de bus de 5V de la protoboard.

Paso 2: Configura la interfaz SPI e instala la librería spidev (consulta Configuración de SPI para instrucciones detalladas).
Si ya has completado estos pasos, puedes omitirlos.
Paso 3: Entra a la carpeta del código.
cd ~/raphael-kit/python
Paso 4: Ejecuta.
sudo python3 4.1.10-2_SmartFan.py
Al ejecutar el código, inicia el ventilador presionando el botón. Cada vez que lo presiones, se ajustará la velocidad en un nivel arriba o abajo. Hay 5 niveles de velocidad: 0~4. Cuando se ajusta al 4° nivel y presionas de nuevo el botón, el ventilador se detiene con velocidad 0.
Una vez que la temperatura suba o baje más de 2℃, la velocidad automáticamente aumenta o disminuye un nivel.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código siguiente.
Pero antes de eso, necesitas ir a la ruta del código fuente como raphael-kit/python.
Después de modificar el código, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
# Configuración de pines
BTN_PIN = 22 # Botón GPIO (pin físico 15)
MOTOR_IN1 = 5 # Motor hacia adelante
MOTOR_IN2 = 6 # Motor hacia atrás
MOTOR_EN = 13 # Pin de habilitación PWM
# Configuración GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(MOTOR_IN1, GPIO.OUT)
GPIO.setup(MOTOR_IN2, GPIO.OUT)
GPIO.setup(MOTOR_EN, GPIO.OUT)
# Configuración PWM para control de velocidad del motor
pwm = GPIO.PWM(MOTOR_EN, 1000) # Frecuencia 1kHz
pwm.start(0)
# Inicializar SPI para MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0
spi.max_speed_hz = 1000000 # 1 MHz
# Variables globales
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
Rt = 10000.0 * Vr / (3.3 - Vr)
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
Cel = tempK - 273.15
return Cel
def motor_run(level):
if level == 0:
GPIO.output(MOTOR_IN1, GPIO.LOW)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(0)
return 0
if level >= 4:
level = 4
GPIO.output(MOTOR_IN1, GPIO.HIGH)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(level * 25) # Mapea nivel (1–4) a 25%–100%
return level
def changeLevel(channel):
global level, currentTemp, markTemp
print("Botón presionado")
level = (level + 1) % 5
markTemp = currentTemp
# Detección de evento para pulsación del botón
GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
def main():
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
time.sleep(0.2)
try:
main()
except KeyboardInterrupt:
pass
finally:
pwm.stop()
GPIO.cleanup()
spi.close()
Explicación del código
Importar los módulos requeridos:
RPi.GPIOpara control de GPIO (botón y motor),spidevpara comunicación con el MCP3008,timepara retardos,mathpara el cálculo de temperatura usando funciones logarítmicas.
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math
Configurar pines GPIO:
Botón en GPIO22 (con resistencia pull-up interna),
Control de motor usando GPIO5 (adelante), GPIO6 (atrás) y GPIO13 (habilitación PWM).
BTN_PIN = 22 MOTOR_IN1 = 5 MOTOR_IN2 = 6 MOTOR_EN = 13 GPIO.setmode(GPIO.BCM) GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(MOTOR_IN1, GPIO.OUT) GPIO.setup(MOTOR_IN2, GPIO.OUT) GPIO.setup(MOTOR_EN, GPIO.OUT) pwm = GPIO.PWM(MOTOR_EN, 1000) pwm.start(0)
Inicializar comunicación SPI con MCP3008 (Bus 0, Chip Enable 0) a 1 MHz.
spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
Definir función
read_adc()para leer un valor analógico de 10 bits (0–1023) del canal MCP3008 especificado (0–7).def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Definir función
temperature()para:Convertir voltaje analógico a resistencia,
Aplicar la ecuación Steinhart–Hart simplificada para calcular temperatura en Celsius.
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 Rt = 10000.0 * Vr / (3.3 - Vr) tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return Cel
Definir
motor_run()para:Detener el motor en nivel 0,
Ejecutar el motor hacia adelante con mayor velocidad según nivel 1–4, con ciclo de trabajo PWM de 25% a 100%.
def motor_run(level): if level == 0: GPIO.output(MOTOR_IN1, GPIO.LOW) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(0) return 0 if level >= 4: level = 4 GPIO.output(MOTOR_IN1, GPIO.HIGH) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(level * 25) return level
Definir función de callback
changeLevel()para el botón:Aumentar el nivel del motor cíclicamente (0 a 4),
Registrar la temperatura actual como nueva referencia.
def changeLevel(channel): global level, currentTemp, markTemp print("Botón presionado") level = (level + 1) % 5 markTemp = currentTemp GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
Definir bucle
main()para:Monitorear cambios de temperatura respecto a la temperatura de referencia,
Disminuir el nivel si la temperatura baja 2°C o más,
Aumentar el nivel si la temperatura sube 2°C o más,
Ajustar la velocidad del motor cada 0,2 segundos.
def main(): global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) time.sleep(0.2)
Ejecutar la función principal y asegurar limpieza al presionar Ctrl+C (detener motor, limpiar GPIO, cerrar SPI).
try: main() except KeyboardInterrupt: pass finally: pwm.stop() GPIO.cleanup() spi.close()