步进电机
概述
在本课中,您将学习如何使用 ULN2003 驱动器和 Arduino Uno R4 控制步进电机,特别是 28BYJ-48 型号。步进电机用于各种应用,例如 3D 打印机、CNC 机床、机器人技术,甚至常见的家用电器。它们的精确控制允许进行精细的运动,使其成为需要高定位精度的项目的理想选择。
在本项目中,我们将配置 28BYJ-48 步进电机,使其以不同速度顺时针和逆时针旋转。这类步进电机通常用于自动化系统中,用于旋转物体或驱动需要精确控制的机构。例如,它们可用于自动窗帘,窗帘在特定时间或特定条件下打开或关闭。通过了解如何控制步进电机的旋转和速度,您将能够将它们整合到自己的电子项目中。
所需元件
本项目中,我们需要以下元件。
购买整套套件会更加方便,以下是链接:
名称 |
套件所含项目 |
链接 |
|---|---|---|
Elite Explorer 套件 |
300+ |
您也可以从以下链接单独购买。
元件介绍 |
购买链接 |
|---|---|
- |
|
- |
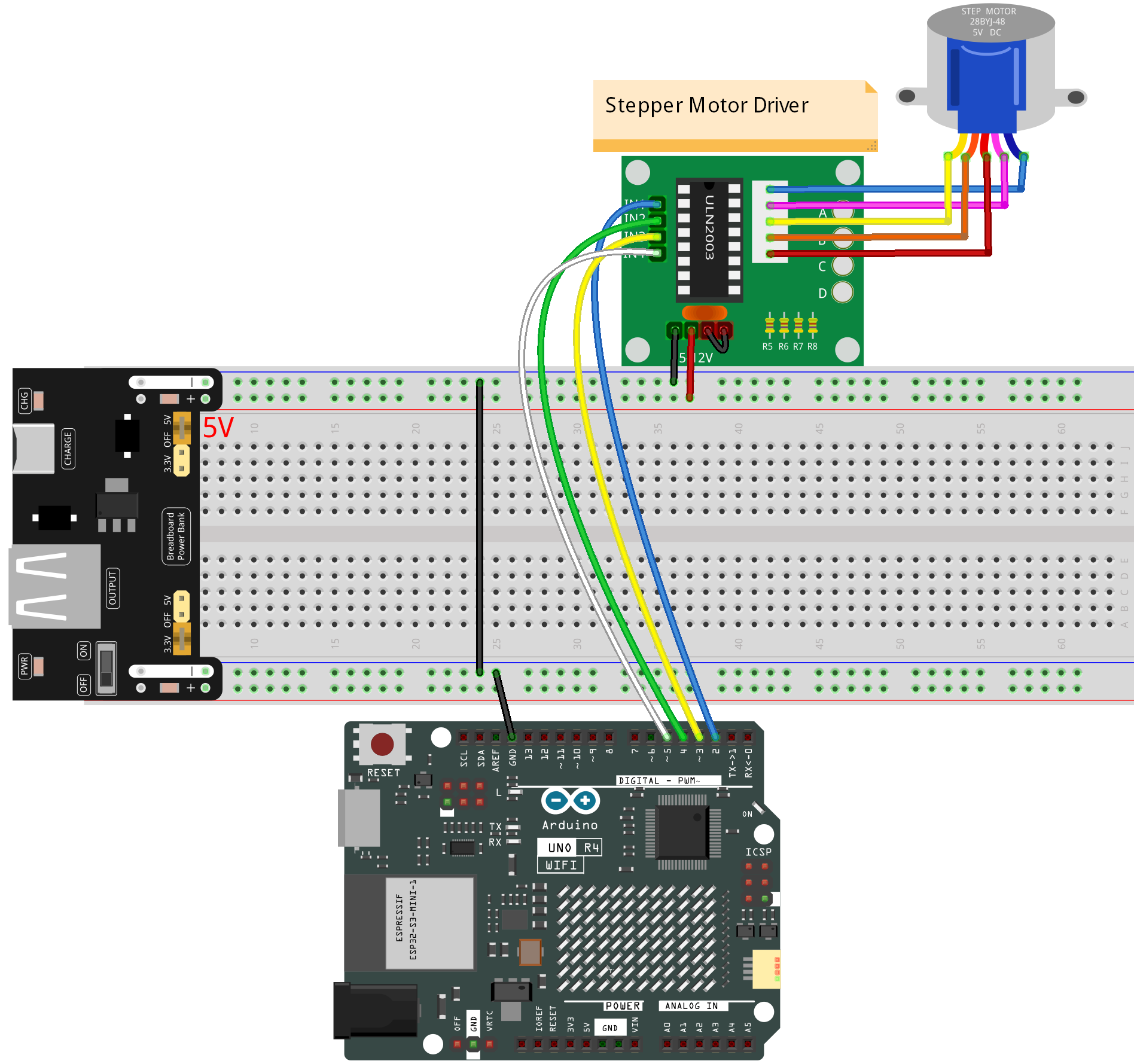
接线
警告
由于步进电机功耗较高,建议使用外部 5V 电源,而不是依赖 Arduino 供电。
虽然可以直接从 Arduino 为步进电机供电,但不建议这样做,因为它会在电源线上产生电气噪声,可能导致 Arduino 损坏。
备注
为了保护 电源模块 的电池,首次使用前请将其充满电。
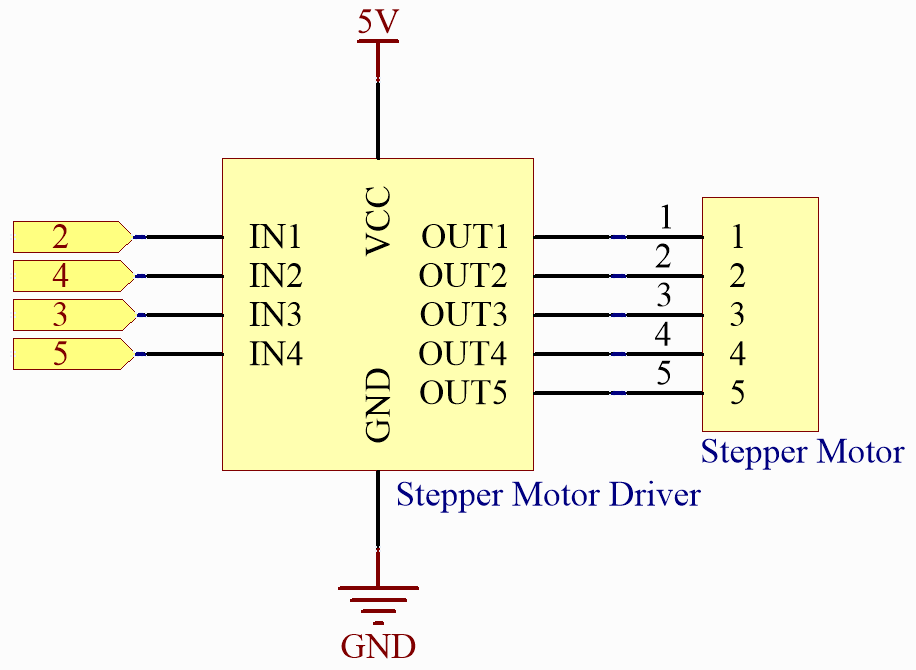
原理图
代码
备注
您可以直接打开路径
elite-explorer-kit-main\basic_project\26-stepper_motor下的26-stepper_motor.ino文件。或者将以下代码复制到 Arduino IDE 中。
将代码上传到 Arduino Uno 板后,28BYJ-48 步进电机将在 ULN2003 驱动器的驱动下开始旋转。首先,电机将以 5 RPM(每分钟转数)的速度顺时针旋转一整圈。完成顺时针旋转后,电机将暂停 1 秒。
随后,电机将以 15 RPM 的较高速度逆时针旋转另一整圈。逆时针旋转后,电机将再次暂停 1 秒。只要 Arduino 保持通电,旋转和暂停循环将无限期地持续下去。
代码分析
初始化步进电机
#include <Stepper.h> // 包含 Stepper 库 #define STEPS 2038 // 定义电机每转的步数 Stepper stepper(STEPS, 2, 3, 4, 5); // 初始化步进电机对象并设置引脚连接 (IN1, IN3, IN2, IN4)
包含头文件
Stepper.h,设置步数为 2038,然后使用 stepper() 函数初始化步进电机。STEPS:电机转一圈的步数。对于此步进电机,此值为 2038。Stepper(steps, pin1, pin2, pin3, pin4):此函数创建一个新的 Stepper 类实例,代表连接到 Arduino 板的特定步进电机。引脚 pin1、pin2、pin3 和 pin4 对应于 ULN2003 驱动器上的 IN1、IN3、IN2 和 IN4 引脚。loop() 函数
void loop() { // 以 5 RPM 顺时针旋转 stepper.setSpeed(5); stepper.step(STEPS); // 顺时针旋转一整圈 delay(1000); // 等待 1 秒 // 以 15 RPM 逆时针旋转 stepper.setSpeed(15); stepper.step(-STEPS); // 逆时针旋转一整圈 delay(1000); // 等待 1 秒 }
主程序使步进电机持续旋转,以 5 RPM 完成一整圈顺时针旋转,然后以 15 RPM 完成一整圈逆时针旋转。
setSpeed(rpms):设置电机速度,单位为每分钟转数(RPM)。此函数不会使电机转动,只是设置在调用 step() 时的旋转速度。rpms:电机旋转速度,以每分钟转数为单位 - 正数(long)
step(steps):此函数使用最近一次调用 setSpeed() 时设置的速度,将电机旋转指定的步数。需要注意的是,此函数以阻塞方式运行,意味着它将等待电机完成运动后,才允许控制权传递到草图中的下一行。例如,如果您将速度设置为 1 RPM 并在具有 2038 步的电机上调用 step(2038),则此函数将需要整整一分钟才能执行完毕。要实现更精确的控制,建议保持较高的速度,并且在每次调用 step() 时只移动几步。
steps:要使电机旋转的步数 - 正数表示向一个方向旋转,负数表示向相反方向旋转 (int)。