超声波传感器
概述
当您倒车时,会看到汽车与周围障碍物之间的距离以避免碰撞。用于检测距离的装置就是超声波传感器。在本实验中,您将学习超声波如何检测距离。
所需元件
本项目中,我们需要以下元件。
购买整套套件会更加方便,以下是链接:
名称 |
套件所含项目 |
链接 |
|---|---|---|
Elite Explorer 套件 |
300+ |
您也可以从以下链接单独购买。
元件介绍 |
购买链接 |
|---|---|
- |
|
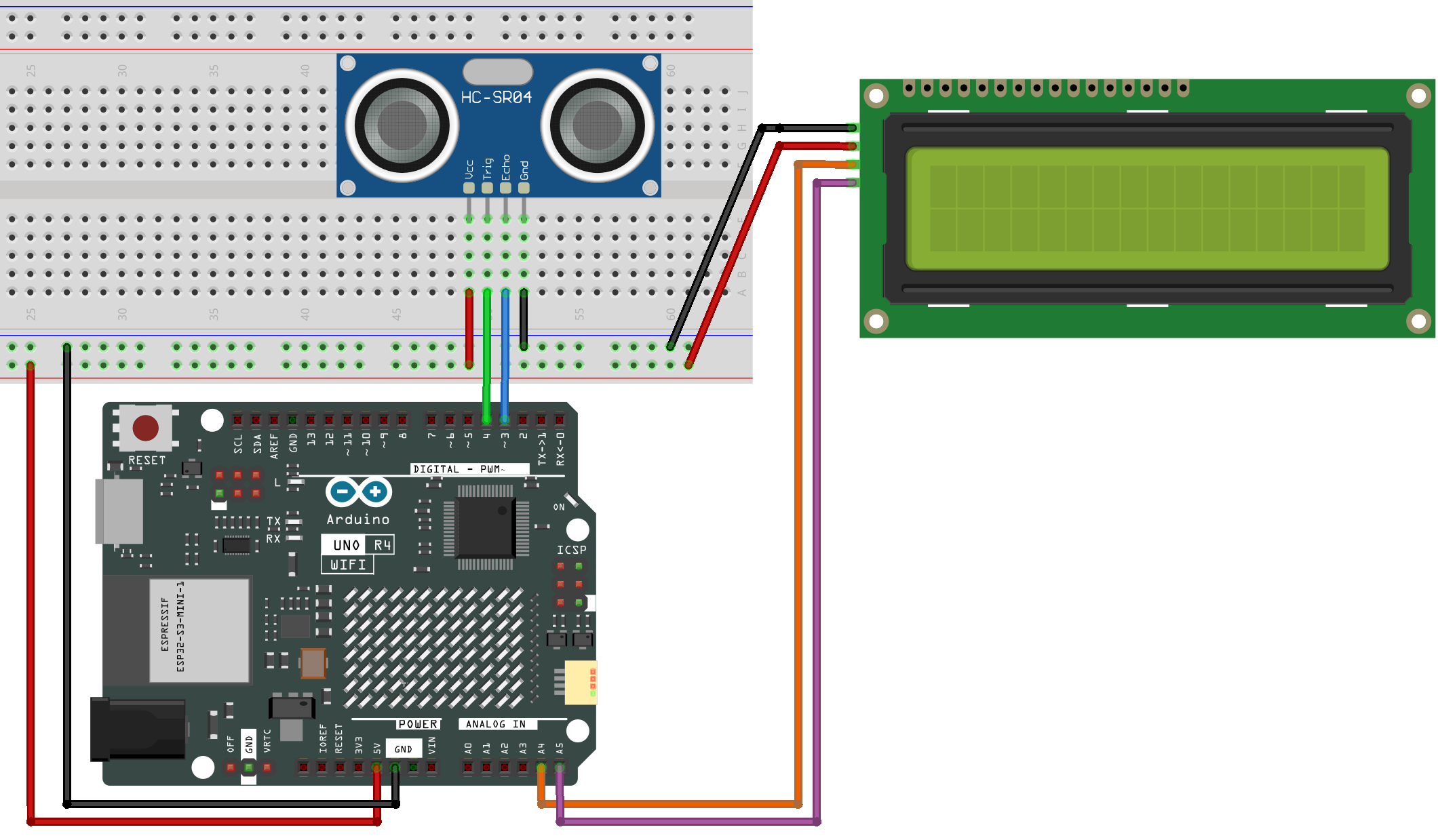
接线
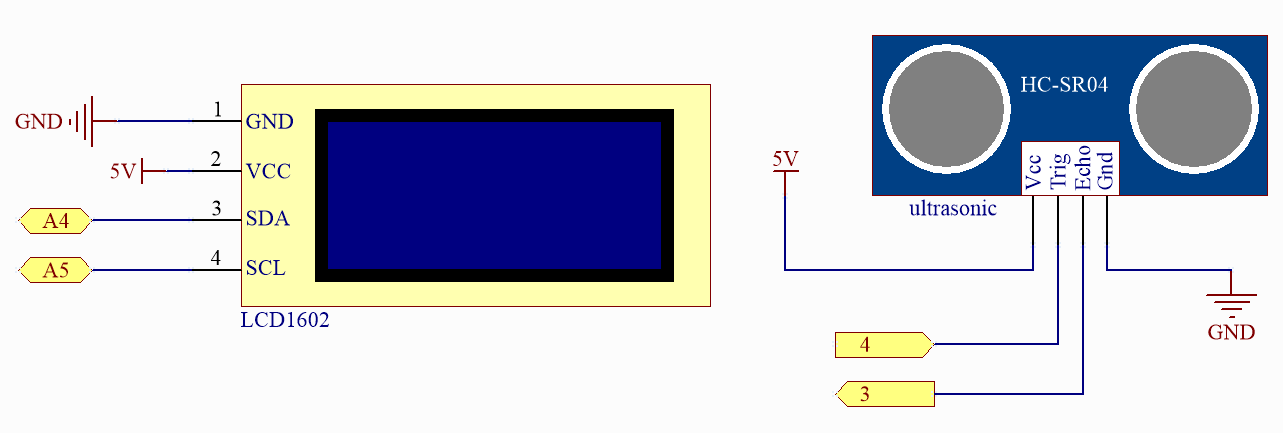
原理图
代码
备注
您可以直接打开路径
elite-explorer-kit-main\basic_project\06-ultrasonic下的06-ultrasonic.ino文件。或者将以下代码复制到 Arduino IDE 中。
代码分析
1. 初始化超声波传感器和 LCD1602
#include <LiquidCrystal_I2C.h> LiquidCrystal_I2C lcd(0x27, 16, 2); // 初始化 Liquid Crystal Display 对象,I2C 地址为 0x27,16 列 2 行 // 定义超声波传感器的引脚编号 const int echoPin = 3; const int trigPin = 4; void setup() { pinMode(echoPin, INPUT); // 将 echo 引脚设置为输入 pinMode(trigPin, OUTPUT); // 将 trig 引脚设置为输出 lcd.init(); // 初始化 LCD lcd.clear(); // 清除 LCD 显示 lcd.backlight(); // 确保背光亮起 }
2. 在 LCD1602 上显示距离
void loop() { float distance = readDistance(); // 调用函数读取传感器数据并获取距离 lcd.setCursor(0, 0); // 将光标置于第 1 行第 1 列。从此处开始显示字符 lcd.print("Distance:"); // 在 LCD 上打印 Distance: lcd.setCursor(0, 1); // 将光标置于第 1 行第 0 列 lcd.print(" "); // 在字符后留出一些空格,以清除可能残留的前一个字符 lcd.setCursor(7, 1); // 将光标置于第 1 行第 7 列 lcd.print(distance); // 在 LCD 上打印从发送和接收 ping 之间转换的距离值 lcd.setCursor(14, 1); // 将光标置于第 1 行第 14 列 lcd.print("cm"); // 打印单位 "cm" delay(800); // 延迟 800 毫秒后重复循环 }
3. 将时间转换为距离
float readDistance(){// ...}这里,”PING” 指的是超声波传感器发送超声波脉冲(或 “ping”)然后等待其回波的过程。
PING 由一个 2 微秒或更长的高电平脉冲触发(先给出一个短暂的低电平脉冲以确保干净的高电平脉冲)。
digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW);echo 引脚用于读取 PING 信号,一个高电平脉冲,其持续时间是从发送 ping 到接收到物体回波的时间(以微秒为单位)。我们使用以下函数获取持续时间。
pulseIn(echoPin, HIGH);声速为 340 m/s,即每厘米 29 微秒。
这给出了 ping 传播的距离,包括去程和回程,因此我们除以 2 来得到障碍物的距离。
float distance = pulseIn(echoPin, HIGH) / 29.00 / 2; // 公式:(340m/s * 1us) / 2