电机
概述
在本课中,您将学习如何使用电机,其工作原理是通电线圈在磁场中受力旋转,电机的转子随之转动,小齿轮驱动发动机飞轮旋转。
所需元件
本项目中,我们需要以下元件。
购买整套套件会更加方便,以下是链接:
名称 |
套件所含项目 |
链接 |
|---|---|---|
Elite Explorer 套件 |
300+ |
您也可以从以下链接单独购买。
元件介绍 |
购买链接 |
|---|---|
- |
|
- |
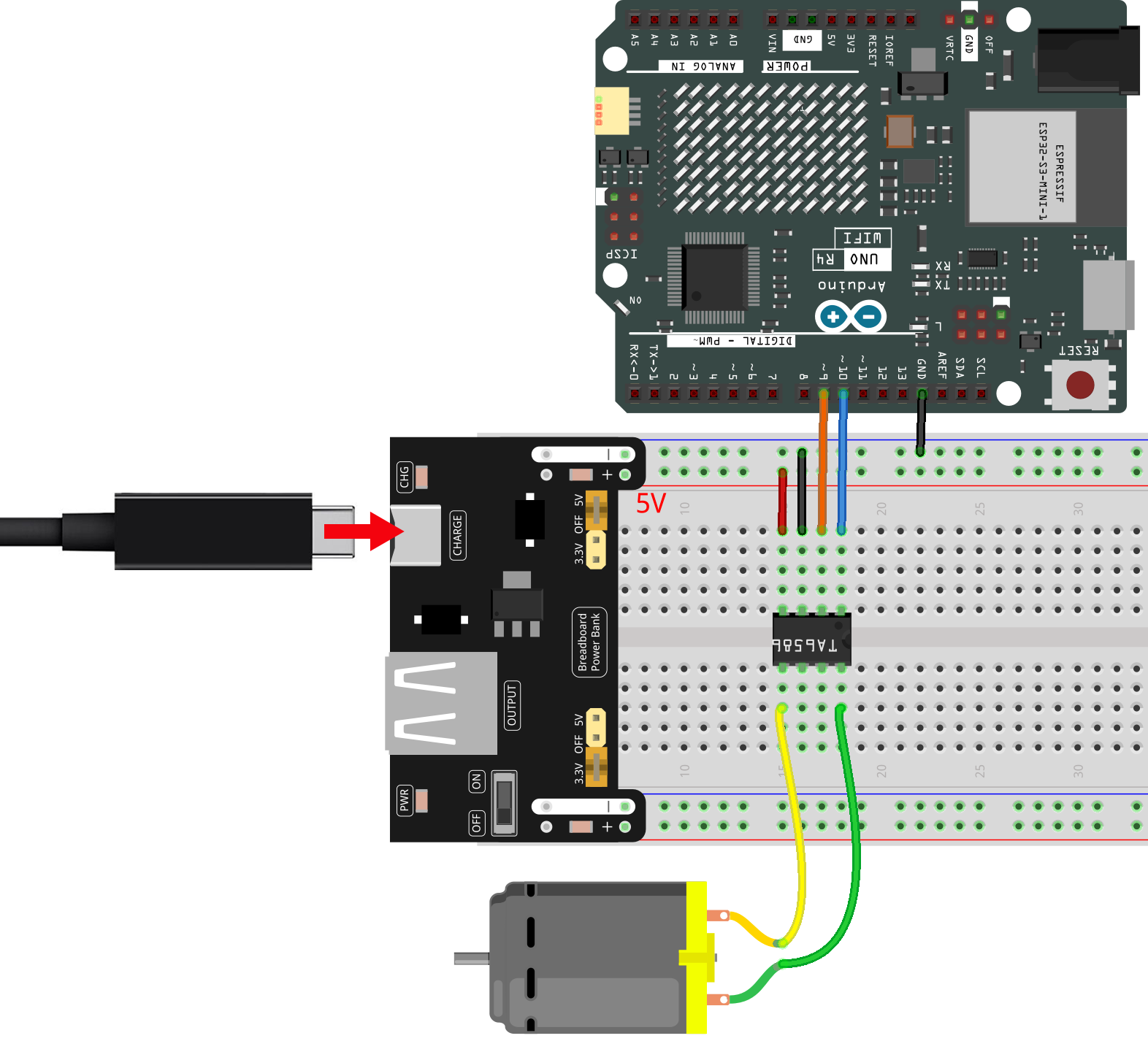
接线
在本示例中,我们使用电源模块为面包板的正极和负极供电。
备注
电机在运行过程中需要更多电力,因此使用时请保持电源模块连接到充电线。
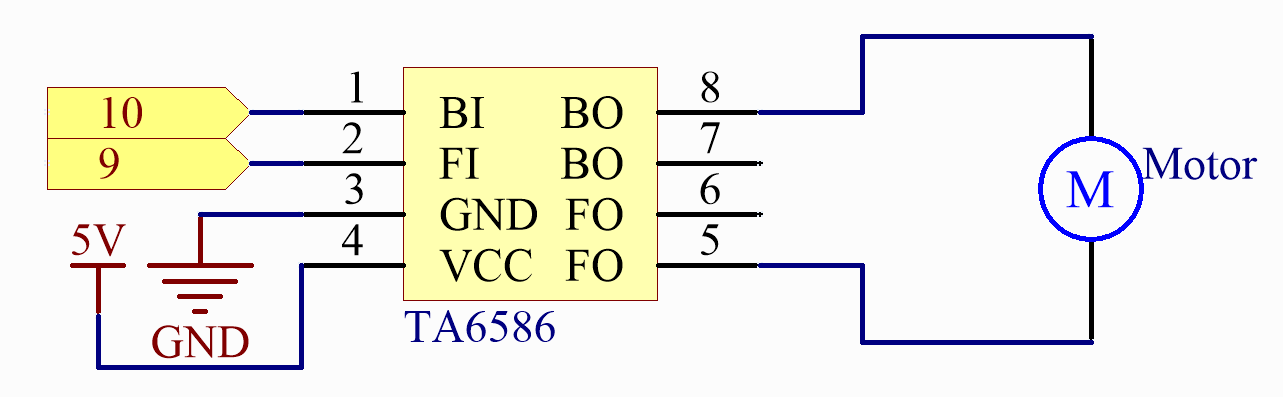
原理图
代码
备注
您可以直接打开路径
elite-explorer-kit-main\basic_project\24-motor下的24-motor.ino文件。或者将以下代码复制到 Arduino IDE 中。
将代码上传到 UNO 板后,您可以通过在串口监视器中输入”A”或”B”来选择电机的旋转方向。
代码分析
通过在电机两侧的铜片之间提供电压差,可以驱动电机。 因此,只需将一侧铜片的电压写为 0,另一侧写为 5V。修改写入的模拟信号值以调整方向和速度。
// 顺时针旋转电机的函数
void clockwise(int Speed) {
analogWrite(motorBI, 0);
analogWrite(motorFI, Speed);
}
// 逆时针旋转电机的函数
void anticlockwise(int Speed) {
analogWrite(motorBI, Speed);
analogWrite(motorFI, 0);
}
在此示例中,使用 Serial.Read() 来控制电机方向。
当您在串口监视器中输入 ‘A’ 时,调用 clockwise (255) 函数使电机以速度 255 旋转。 输入 ‘B’,电机将反向旋转。
void loop() {
// 检查串口是否有可用数据
if (Serial.available() > 0) {
int incomingByte = Serial.read(); // 读取传入数据
// 根据用户输入确定电机方向
switch (incomingByte) {
case 'A':
clockwise(255); // 顺时针旋转电机
Serial.println("电机顺时针旋转。");
break;
case 'B':
anticlockwise(255); // 逆时针旋转电机
Serial.println("电机逆时针旋转。");
break;
}
}
delay(3000); // 等待 3 秒
stopMotor(); // 停止电机
}