步进电机

步进电机由于其独特的设计,可以在没有任何反馈机制的情况下实现高精度控制。步进电机的转轴上安装有一系列磁铁,由一系列电磁线圈控制,这些线圈按特定顺序正向和反向充电,从而以微小的”步进”精确地向前或向后移动。
原理
步进电机有两种类型:单极性和双极性,了解您正在使用哪种类型非常重要。在本实验中,我们将使用单极性步进电机。
步进电机是一种四相电机,使用单极性直流电源。只要按照适当的时序为电机的各相绕组通电,就可以使其一步一步地旋转。四相反应式步进电机的原理图:
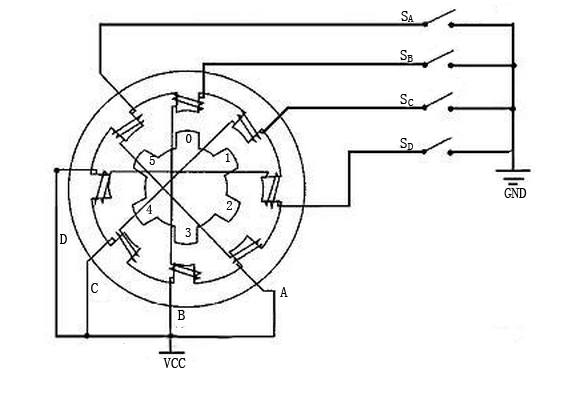
图中,电机中间是一个转子——一个齿轮状的永磁体。转子周围是0到5号齿。再外面是8个磁极,每两个相对的磁极通过线圈绕组连接。因此它们形成A到D四对,称为一相。它有四根引线连接到开关SA、SB、SC和SD。因此,四相在电路中是并联的,同一相中的两个磁极是串联的。
以下是四相步进电机的工作原理:
开始时,开关SB通电,开关SA、SC和SD断电,B相磁极与转子的0号和3号齿对齐。同时,1号和4号齿与C相和D相磁极产生错齿。2号和5号齿与D相和A相磁极产生错齿。当开关SC通电,开关SB、SA和SD断电时,转子在C相绕组的磁场以及1号和4号齿之间的磁场作用下旋转。然后1号和4号齿与C相绕组的磁极对齐。而0号和3号齿与A相和B相磁极产生错齿,2号和5号齿与A相和D相磁极产生错齿。如此循环往复。依次给A、B、C、D相通电,转子将按照A、B、C、D的顺序旋转。
四相步进电机有三种工作模式:单四拍、双四拍和八拍。单四拍和双四拍的步进角相同,但单四拍的驱动力矩较小。八拍的步进角是单四拍和双四拍的一半。因此,八拍工作模式可以保持较高的驱动力矩并提高控制精度。在本实验中,我们让步进电机以八拍模式工作。
ULN2003模块
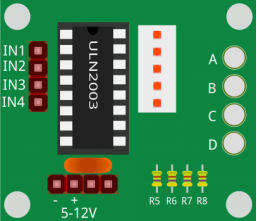
为了在电路中使用电机,需要使用驱动板。步进电机驱动ULN2003是一款7通道反相器电路。也就是说,当输入端为高电平时,ULN2003的输出端为低电平,反之亦然。如果给IN1提供高电平,给IN2、IN3和IN4提供低电平,那么输出端OUT1为低电平,其他所有输出端为高电平。因此D1点亮,开关SA接通,步进电机旋转一步。依此类推。因此,只需给步进电机提供特定的时序,它就会一步一步地旋转。这里的ULN2003用于为步进电机提供特定的时序。
示例