舵机
概述
在本课中,您将探索 Arduino 和舵机的使用。重点介绍 Arduino Uno 和 SG90 舵机,您将学习如何编程 Arduino 来控制舵机的扫动运动。该技术对于机器人和自动化系统等各种应用至关重要。
所需元件
本项目中,我们需要以下元件。
购买整套套件会更加方便,以下是链接:
名称 |
套件所含项目 |
链接 |
|---|---|---|
Elite Explorer 套件 |
300+ |
您也可以从以下链接单独购买。
元件介绍 |
购买链接 |
|---|---|
- |
|
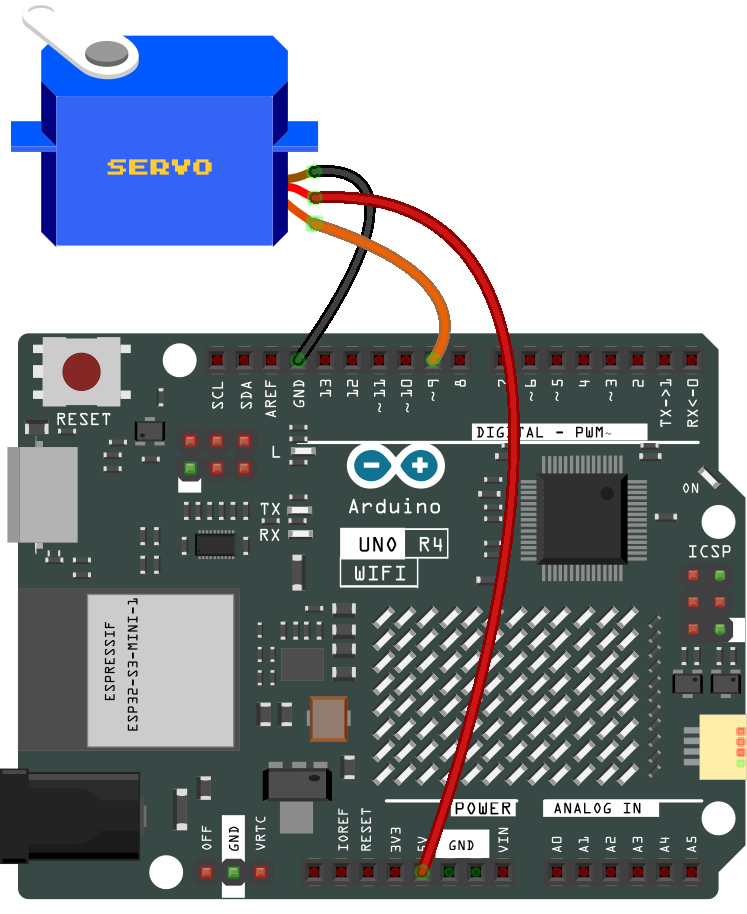
接线
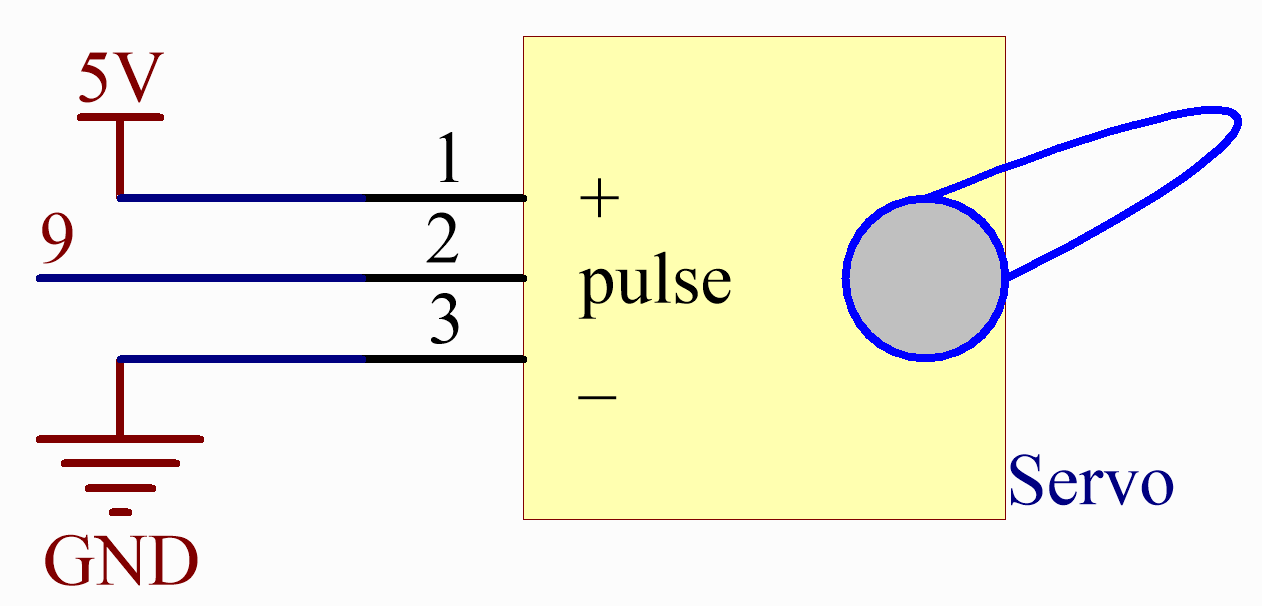
原理图
代码
备注
您可以直接打开路径
elite-explorer-kit-main\basic_project\27-servo下的27-servo.ino文件。或者将以下代码复制到 Arduino IDE 中。
代码分析
这里包含了
Servo库,它允许轻松控制舵机。还定义了连接到舵机的引脚和舵机的初始角度。#include <Servo.h> const int servoPin = 9; // 定义舵机引脚 int angle = 0; // 将角度变量初始化为 0 度 Servo servo; // 创建一个舵机对象
setup()函数在 Arduino 启动时运行一次。使用attach()函数将舵机连接到定义的引脚。void setup() { servo.attach(servoPin); }
主循环包含两个
for循环。第一个循环将角度从 0 度增加到 180 度,第二个循环将角度从 180 度减小到 0 度。servo.write(angle)命令将舵机设置为指定角度。delay(15)使舵机在移动到下一个角度之前等待 15 毫秒,从而控制扫动运动的速度。void loop() { // 从 0 度扫描到 180 度 for (angle = 0; angle < 180; angle++) { servo.write(angle); delay(15); } // 现在从 180 度扫描回 0 度 for (angle = 180; angle > 0; angle--) { servo.write(angle); delay(15); } }