摇杆模块
概述
摇杆是一种输入设备,由一个在底座上旋转的摇杆组成,向所控制的设备报告其角度或方向。摇杆常用于控制视频游戏和机器人。这里使用的是 PS2 摇杆。
所需元件
本项目中,我们需要以下元件。
购买整套套件会更加方便,以下是链接:
名称 |
套件所含项目 |
链接 |
|---|---|---|
Elite Explorer 套件 |
300+ |
您也可以从以下链接单独购买。
元件介绍 |
购买链接 |
|---|---|
- |
|
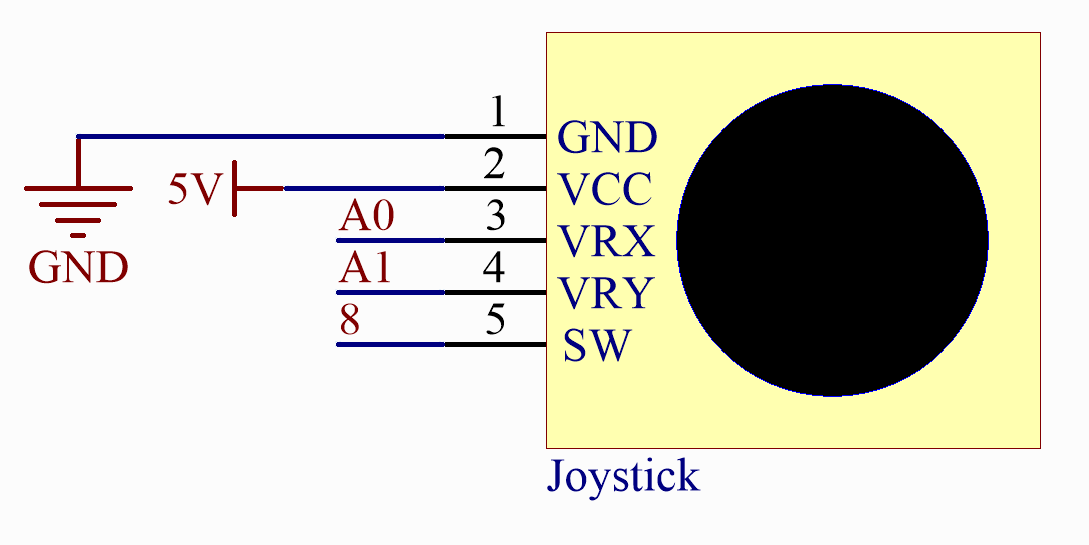
接线
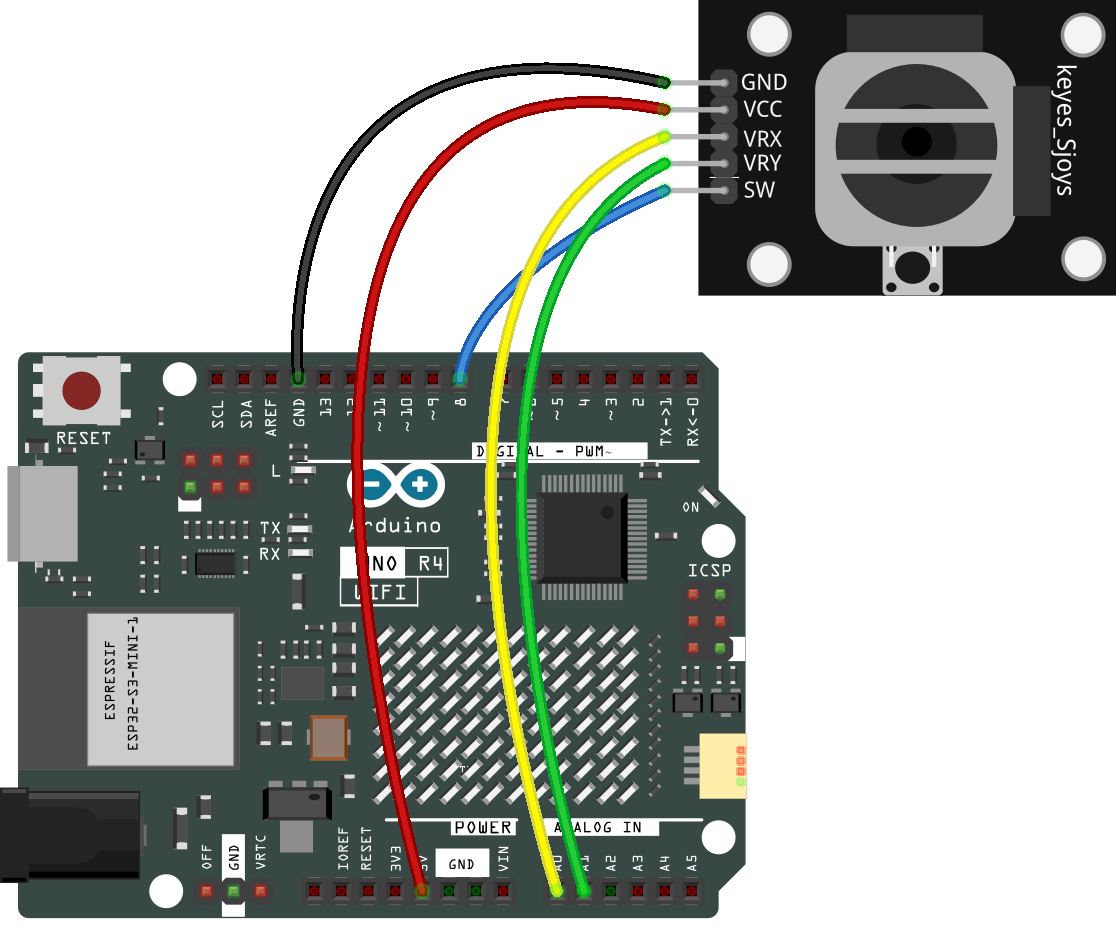
原理图
该模块有两个模拟输出(对应 X、Y 双轴偏移)。
在本实验中,我们使用 Uno 板检测摇杆旋钮的移动方向。
代码
备注
您可以直接打开路径
elite-explorer-kit-main\basic_project\20-joystick下的20-joystick.ino文件。或者将以下代码复制到 Arduino IDE 中。
现在,当您推动摇杆时,串口监视器上显示的 X 和 Y 轴坐标将相应变化。按下按钮还将显示坐标 Z=0。
代码分析
该代码使用串口监视器打印摇杆 PS2 的 VRX 和 VRY 引脚的值。
void loop()
{
Serial.print("X: ");
Serial.print(analogRead(xPin), DEC); // 以十进制格式打印 VRX 的值
Serial.print("|Y: ");
Serial.print(analogRead(yPin), DEC); // 以十进制格式打印 VRY 的值
Serial.print("|Z: ");
Serial.println(digitalRead(swPin)); // 打印 SW 的值
delay(50);
}