IMU 模块
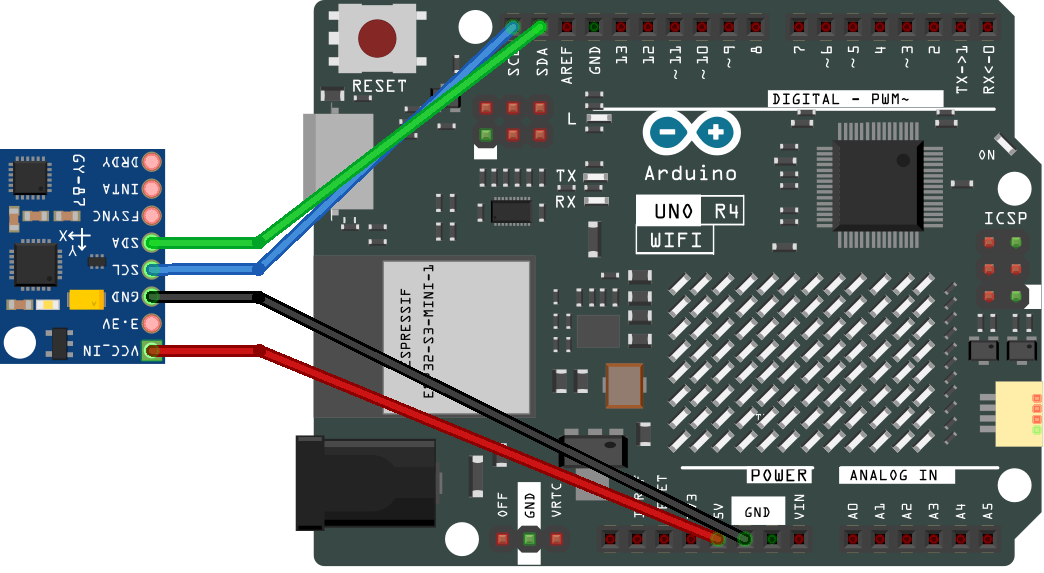
GY-87 模块配备了三款传感器芯片:MPU6050、QMC5883L 和 BMP180,各具独特功能。MPU6050 结合了陀螺仪和加速度计用于运动追踪,QMC5883L 作为磁力计用于方向感测,BMP180 用于测量气压和温度。这些传感器可通过 I2C 协议与 Arduino 进行有效通信。
这些传感器设计用于通过 I2C 协议无缝集成,确保与 Arduino 等平台的高效通信。GY-87 模块中的每个传感器都可通过独特的 I2C 地址访问:MPU6050 的地址为 0x68,QMC5883L 的地址为 0x0D,BMP180 的地址为 0x77。
每个传感器芯片的单独教程:
如果您想同时使用这三款芯片,以下是一个简单示例:
备注
您可以直接打开路径
elite-explorer-kit-main\basic_project\09-gy87下的09-gy87.ino文件。或者将以下代码复制到 Arduino IDE 中。
备注
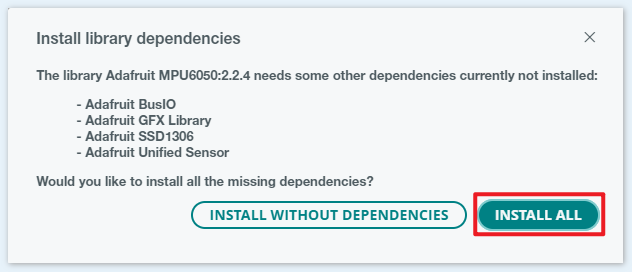
要安装库,请使用 Arduino 库管理器。
搜索 “Adafruit MPU6050” 并安装
安装每个库时,请确保选择安装所有依赖项。
搜索 “Adafruit Unified Sensor” 并安装
搜索 “QMC5883LCompass” 并安装
搜索 “Adafruit BMP085 Library” 并安装
备注
磁力计必须经过校准(校准 QMC5883L)才能用作指南针,使用时必须保持水平,并**远离铁质物体、磁化材料和载流导线** 。
代码成功上传到您的 Arduino Uno R4 后,串口监视器将开始运行,持续打印来自 GY-87 IMU 模块的传感器数据。该模块集成了三个独立的传感器:用于加速度计和陀螺仪读数的 MPU6050、用于磁力计读数的 QMC5883L,以及用于气压和温度读数的 BMP180。