Nota
Ciao, benvenuto nella community di appassionati di SunFounder Raspberry Pi, Arduino ed ESP32 su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci di nuovi prodotti.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e omaggi festivi: Partecipa a omaggi e promozioni speciali durante le festività.
👉 Pronto per esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
Motore Passo-Passo

I motori passo-passo, grazie al loro design unico, possono essere controllati con un alto grado di precisione senza meccanismi di feedback. L’albero di un motore passo-passo, dotato di una serie di magneti, è controllato da una serie di bobine elettromagnetiche che vengono caricate positivamente e negativamente in una sequenza specifica, facendolo avanzare o arretrare in piccoli «passi».
Principio di Funzionamento
Esistono due tipi di motori passo-passo: unipolari e bipolari, ed è molto importante sapere con quale tipo si sta lavorando. In questo esperimento utilizzeremo un motore passo-passo unipolare.
Il motore passo-passo è a quattro fasi, alimentato da una sorgente DC unipolare. Finché si alimentano tutte le fasi del motore seguendo una sequenza di temporizzazione appropriata, è possibile farlo ruotare passo dopo passo. Lo schema elettrico di un motore passo-passo reattivo a quattro fasi:
Come funziona un motore passo-passo a 4 fasi:
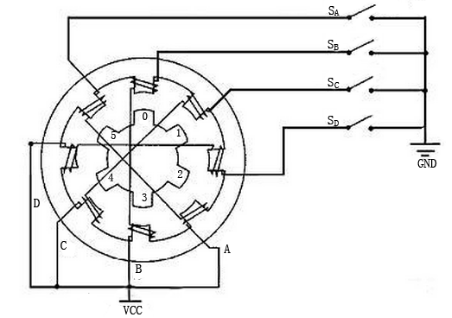
Nella figura, al centro del motore si trova un rotore, un magnete permanente a forma di ingranaggio. Attorno al rotore, da 0 a 5 ci sono i denti. Più esternamente, ci sono 8 poli magnetici, con ogni coppia opposta collegata da un avvolgimento di bobina. In questo modo, si formano quattro coppie, da A a D, che vengono chiamate fasi. Il motore dispone di quattro fili di collegamento da connettere agli interruttori SA, SB, SC e SD. Pertanto, le quattro fasi sono collegate in parallelo nel circuito, mentre i due poli magnetici di una fase sono in serie.
All’inizio, l’interruttore SB è acceso, mentre gli interruttori SA, SC e SD sono spenti, e i poli magnetici della fase B si allineano con i denti 0 e 3 del rotore. Allo stesso tempo, i denti 1 e 4 formano una configurazione sfalsata con i poli delle fasi C e D. I denti 2 e 5 formano una configurazione sfalsata con i poli delle fasi D e A. Quando l’interruttore SC è acceso, mentre SB, SA e SD sono spenti, il rotore ruota sotto l’influenza del campo magnetico dell’avvolgimento della fase C e tra i denti 1 e 4. I denti 1 e 4 si allineano quindi con i poli magnetici dell’avvolgimento della fase C. Contemporaneamente, i denti 0 e 3 formano una configurazione sfalsata con i poli delle fasi A e B, e i denti 2 e 5 con i poli delle fasi A e D. Questo schema si ripete continuamente. Alimentando le fasi A, B, C e D in sequenza, il rotore ruoterà nell’ordine A, B, C e D.
Il motore passo-passo a quattro fasi ha tre modalità operative: quattro passi singoli, quattro passi doppi e otto passi. L’angolo di passo per le modalità a quattro passi singoli e doppi è lo stesso, ma la coppia di azionamento per i quattro passi singoli è inferiore. L’angolo di passo della modalità a otto passi è la metà di quello delle modalità a quattro passi singoli e doppi. Pertanto, la modalità operativa a otto passi consente di mantenere una coppia di azionamento elevata e di migliorare la precisione del controllo. In questo esperimento, facciamo funzionare il motore passo-passo in modalità a otto passi.
Modulo ULN2003
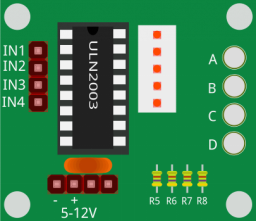
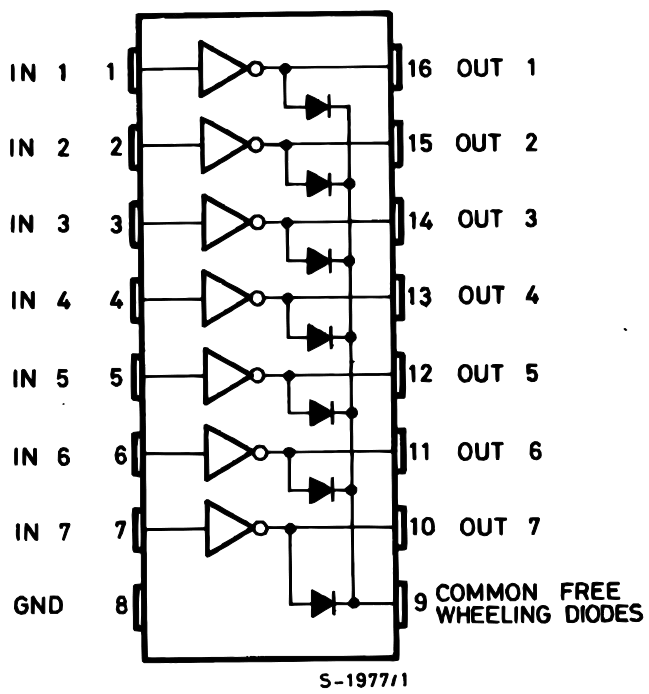
Per applicare il motore al circuito, è necessario utilizzare una scheda driver. Il Driver per Motore Passo-Passo ULN2003 è un circuito inverter a 7 canali. In pratica, quando l’ingresso è a livello alto, l’uscita dell’ULN2003 è a livello basso, e viceversa. Se forniamo un livello alto a IN1 e un livello basso a IN2, IN3 e IN4, allora l’uscita OUT1 sarà a livello basso e tutte le altre uscite saranno a livello alto. In questo modo, il LED D1 si accende, l’interruttore SA è attivo e il motore passo-passo ruota di un passo. Questo schema si ripete continuamente. Pertanto, fornendo al motore passo-passo una sequenza temporale specifica, esso ruoterà passo dopo passo. L’ULN2003 viene utilizzato qui per fornire sequenze temporali specifiche per il motore passo-passo.
Esempio
2.14 Motore Passo-Passo (Progetto Arduino)
3.5 Sistema di Controllo Accessi (Progetto Arduino)