Nota
¡Hola! ¡Bienvenidos a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook! Profundiza en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previews Exclusivos: Accede anticipadamente a anuncios de nuevos productos y adelantos exclusivos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones Festivas y Sorteos: Participa en sorteos y promociones especiales durante las festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
TA6586 - Chip Controlador de Motores
El TA6586 es un circuito integrado monolítico diseñado para controlar motores de corriente continua bidireccionales. Cuenta con dos pines de entrada lógica para controlar la dirección, hacia adelante y hacia atrás. El circuito se caracteriza por su buen rendimiento anti-interferencias, bajo consumo de corriente en espera y baja caída de presión de saturación en la salida. Tiene un diodo de protección integrado para contrarrestar el impacto de la liberación de corriente de carga inductiva, lo que garantiza un uso seguro y fiable al controlar relés, motores de CC, motores paso a paso o fuentes de alimentación conmutadas. El TA6586 es adecuado para vehículos de juguete, motores de aeronaves controladas a distancia, motores de válvulas automáticas, control de cerraduras electromagnéticas, instrumentos de precisión y otros circuitos.
Características
Baja corriente en espera: ≦2uA
Amplio rango de voltaje de alimentación
Función de freno incorporada
Protección contra sobrecalentamiento
Límite de corriente y protección contra cortocircuitos
Paquete DIP8 libre de plomo
Función de los Pines
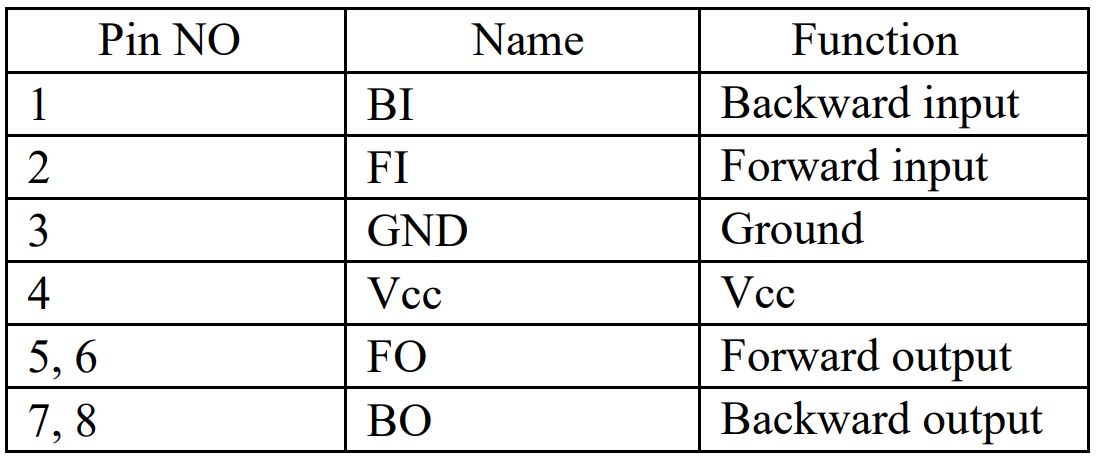
Tabla de Verdad de Entradas

Ejemplo
3.5 Ventilador Pequeño (Para usuarios de MicroPython)
3.5 - Pequeño Ventilador (Para usuarios de Arduino)
3.6 Bombeo (Para usuarios de MicroPython)
3.6 - Bombeo de Agua (Para usuarios de Arduino)
2.12 Ventilador Inteligente (Para usuarios de Piper Make)