Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.12 Ventilador Inteligente
Aquí crearemos un ventilador inteligente controlado por temperatura usando un termistor, TA6586, motor y módulo de alimentación. El ventilador gira automáticamente cuando se alcanza la temperatura configurada.
En este proyecto, necesitamos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
COMPONENTES EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
|
9 |
Portapilas |
1 |
|
10 |
1(10KΩ) |
||
11 |
1 |
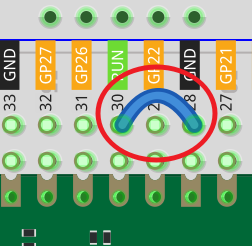
Conexión

Código
Nota
Puedes referirte a la imagen a continuación para escribir el código arrastrando y soltando.
Importa
2.12_smart_fan.png.pngdesde la rutakepler-kit-main\piper. Para obtener tutoriales detallados, consulta Importar el Código.

Después de conectar el Pico W, haz clic en el botón Start y el código comenzará a ejecutarse.
Haz clic en CONSOLA para ver la temperatura actual en Celsius.
El ventilador comienza a girar cuando la temperatura es superior a 25 grados y se detiene cuando es inferior a 25 grados.
Nota
Si el motor sigue girando después de hacer clic en el botón Stop, conecta temporalmente el pin Run del Pico W a GND usando un cable, y luego retira el cable para ejecutar el código nuevamente.
Esto se debe a que el motor consume mucha corriente, lo que puede hacer que el Pico W se desconecte de la computadora.
¿Cómo funciona?
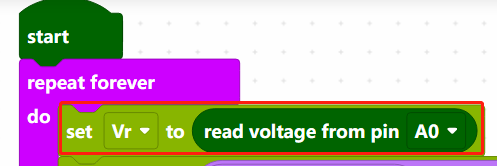
Se lee el voltaje de A0 (GP26) y se asigna a la variable [Vr].
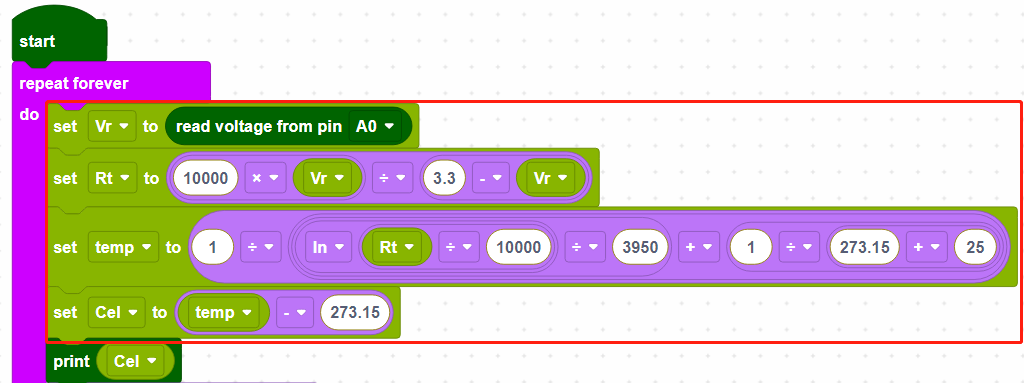
Estos cálculos convierten los valores del termistor a grados centígrados.
Nota
Aquí está la relación entre la resistencia y la temperatura:
RT =RN expB(1/TK – 1/TN)
RT es la resistencia del termistor NTC cuando la temperatura es TK.
RN es la resistencia del termistor NTC bajo la temperatura nominal TN. Aquí, el valor de RN es 10k.
TK es una temperatura en Kelvin y la unidad es K. Aquí, el valor de TK es 273.15 + grados Celsius.
TN es una temperatura nominal en Kelvin; la unidad también es K. Aquí, el valor de TN es 273.15+25.
B (beta) es la constante del material del termistor NTC, también conocida como índice de sensibilidad térmica, con un valor de 3950.
exp es la abreviatura de exponencial, y la base e es un número natural que vale aproximadamente 2.7.
Convierte esta fórmula a TK=1/(ln(RT/RN)/B+1/TN) para obtener la temperatura en Kelvin, que menos 273.15 equivale a grados Celsius.
Esta relación es una fórmula empírica y es precisa solo cuando la temperatura y la resistencia están dentro del rango efectivo.
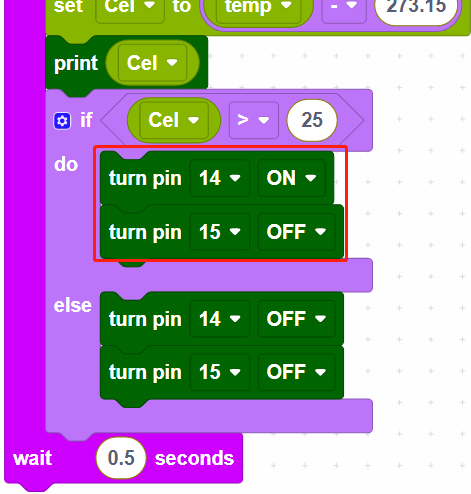
Cuando la temperatura es superior a 25 grados Celsius, ajusta GP14 a ON y GP15 a OFF para que el motor gire, o invierte sus niveles. Cuando la temperatura es inferior a 25 grados Celsius, ajusta GP14 y GP15 ambos en bajo para detener el motor.