Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete junto a otros entusiastas en temas avanzados sobre Raspberry Pi, Arduino y ESP32.
¿Por qué unirse?
Soporte Experto: Resuelve problemas posventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones Exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones en días festivos.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy.
3.5 Ventilador Pequeño
Ahora usaremos el TA6586 para controlar el motor de corriente continua (DC) y hacerlo girar en sentido horario y antihorario. Dado que el motor DC requiere una corriente relativamente alta, utilizamos un módulo de alimentación para suministrarle energía de manera segura.
Componentes Necesarios
En este proyecto, necesitaremos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
|
9 |
Soporte para batería |
1 |
Esquema
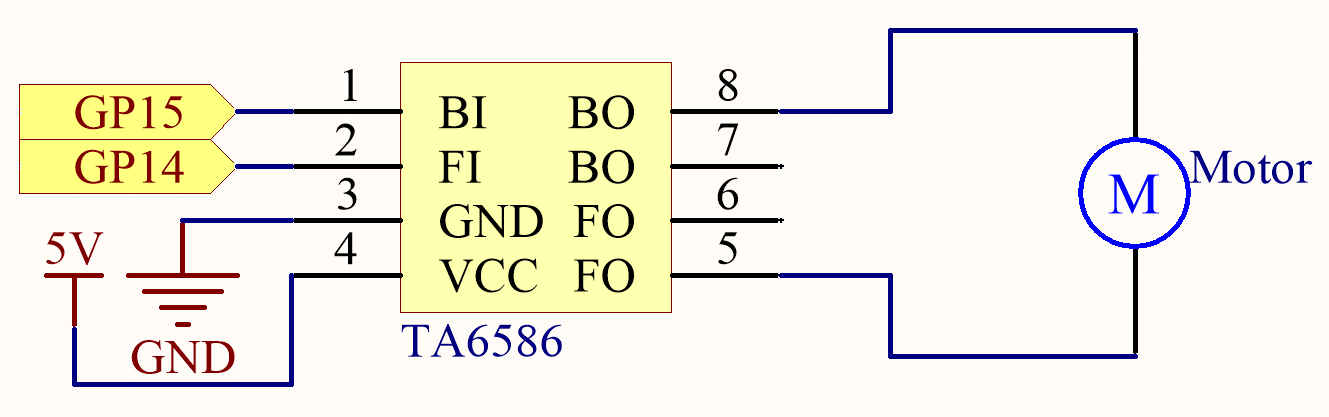
Conexiones
Nota
Dado que los motores DC requieren alta corriente, utilizamos aquí un módulo de carga Li-po para alimentar el motor de manera segura.
Asegúrate de que el módulo de carga Li-po esté conectado como se muestra en el diagrama. De lo contrario, un cortocircuito podría dañar tu batería y el circuito.

Código
Nota
Abre el archivo
3.5_small_fan.pyen la ruta dekepler-kit-main/micropythono copia este código en Thonny, luego haz clic en «Run Current Script» o simplemente presiona F5 para ejecutarlo.No olvides seleccionar el intérprete «MicroPython (Raspberry Pi Pico)» en la esquina inferior derecha.
Para tutoriales detallados, consulta Abrir y ejecutar código directamente.
import machine
import utime
motor1A = machine.Pin(14, machine.Pin.OUT)
motor2A = machine.Pin(15, machine.Pin.OUT)
def clockwise():
motor1A.high()
motor2A.low()
def anticlockwise():
motor1A.low()
motor2A.high()
def stopMotor():
motor1A.low()
motor2A.low()
while True:
clockwise()
utime.sleep(1)
stopMotor()
utime.sleep(1)
anticlockwise()
utime.sleep(1)
stopMotor()
utime.sleep(1)
Una vez que el programa esté en ejecución, el motor girará hacia adelante y hacia atrás en un patrón regular.
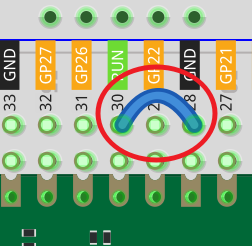
Nota
Si el motor sigue girando después de presionar el botón de detención, necesitas resetear el pin RUN en el Pico W conectándolo a GND mediante un cable y luego desconectar el cable para volver a ejecutar el código.
Esto se debe a que el motor opera con mucha corriente, lo que puede causar que el Pico W se desconecte de la computadora.