Nota
Ciao, benvenuto nella community di SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima a nuovi annunci di prodotti e anticipazioni.
Sconti speciali: Godi di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
Modulo Ultrasuoni
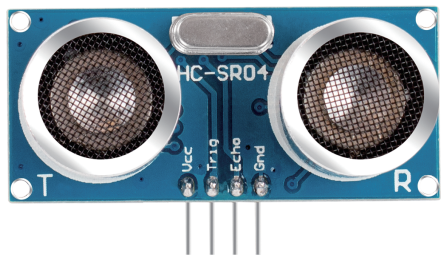
Il modulo di rilevamento a ultrasuoni offre una misurazione senza contatto da 2 cm a 400 cm, con un’accuratezza che può arrivare fino a 3 mm. Può garantire che il segnale rimanga stabile entro 5 metri, indebolendosi gradualmente dopo i 5 metri fino a scomparire a 7 metri.
Il modulo comprende trasmettitori ultrasonici, ricevitore e circuito di controllo. I principi di base sono i seguenti:
Utilizzare un flip-flop IO per generare un segnale di livello alto di almeno 10us.
Il modulo invia automaticamente otto impulsi a 40kHz e rileva se vi è un segnale di ritorno.
Se il segnale ritorna, passando al livello alto, la durata del livello alto sull’uscita IO corrisponde al tempo trascorso dal momento dell’emissione dell’onda ultrasonica fino al suo ritorno. Qui, la distanza misurata = (tempo di livello alto * velocità del suono (340 m / s)) / 2.
Il diagramma temporale è riportato di seguito.
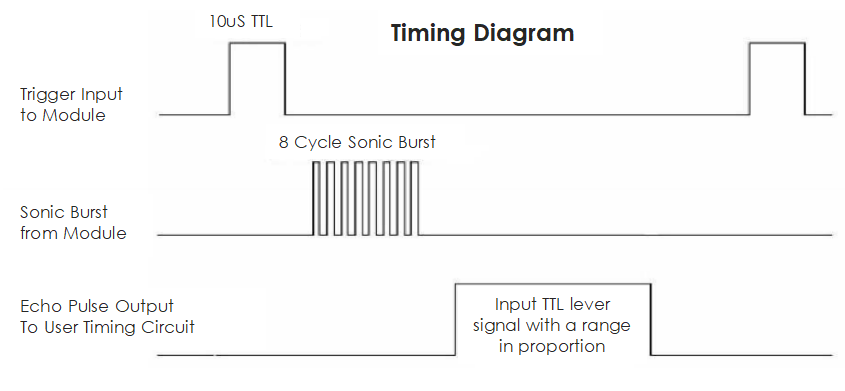
Basta fornire un breve impulso di 10us all’ingresso di trigger per avviare la misurazione; successivamente, il modulo invierà un burst di ultrasuoni di 8 cicli a 40 kHz e rileverà il suo eco. È possibile calcolare la distanza attraverso l’intervallo di tempo tra l’invio del segnale di trigger e la ricezione del segnale di eco.
Formula: us / 58 = centimetri o us / 148 = pollici; oppure: la distanza = tempo di livello alto * velocità (340M/S) / 2; si consiglia di utilizzare un ciclo di misurazione superiore a 60ms per evitare collisioni tra il segnale di trigger e quello di eco.