Note
Bonjour et bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 sur Facebook ! Plongez plus profondément dans l’univers Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après‑vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Obtenez un accès anticipé aux annonces de nouveaux produits et aux avant‑premières.
Réductions spéciales : Profitez de remises exclusives sur nos derniers produits.
Promotions et concours festifs : Participez à des concours et promotions de vacances.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez‑nous dès aujourd’hui !
4.1.10 Ventilateur intelligent (MCP3008)
Note
Selon la version de votre kit, veuillez identifier si vous avez ADC0834 ou MCP3008 et suivre la section correspondante.
Introduction
Dans ce projet, nous utiliserons des moteurs, des boutons et des thermistances pour réaliser un ventilateur intelligent manuel + automatique dont la vitesse de rotation est réglable.
Composants requis
Dans ce projet, nous avons besoin des composants suivants :
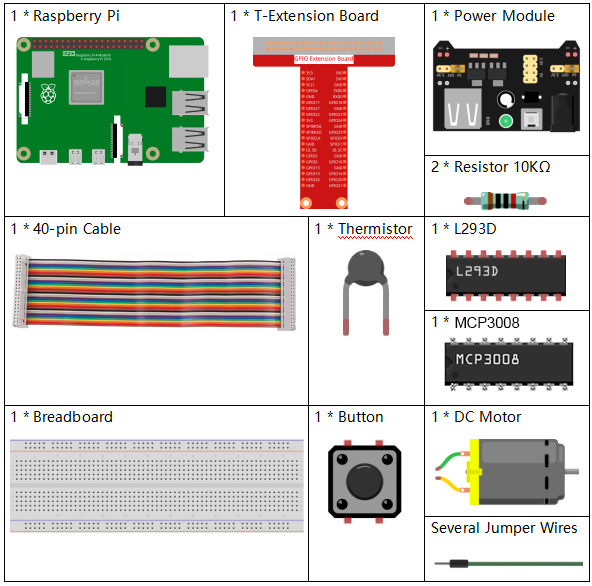
Il est évidemment plus pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci‑dessous :
INTRODUCTION DU COMPOSANT |
LIEN D’ACHAT |
|---|---|
- |
|
- |
|
- |
|
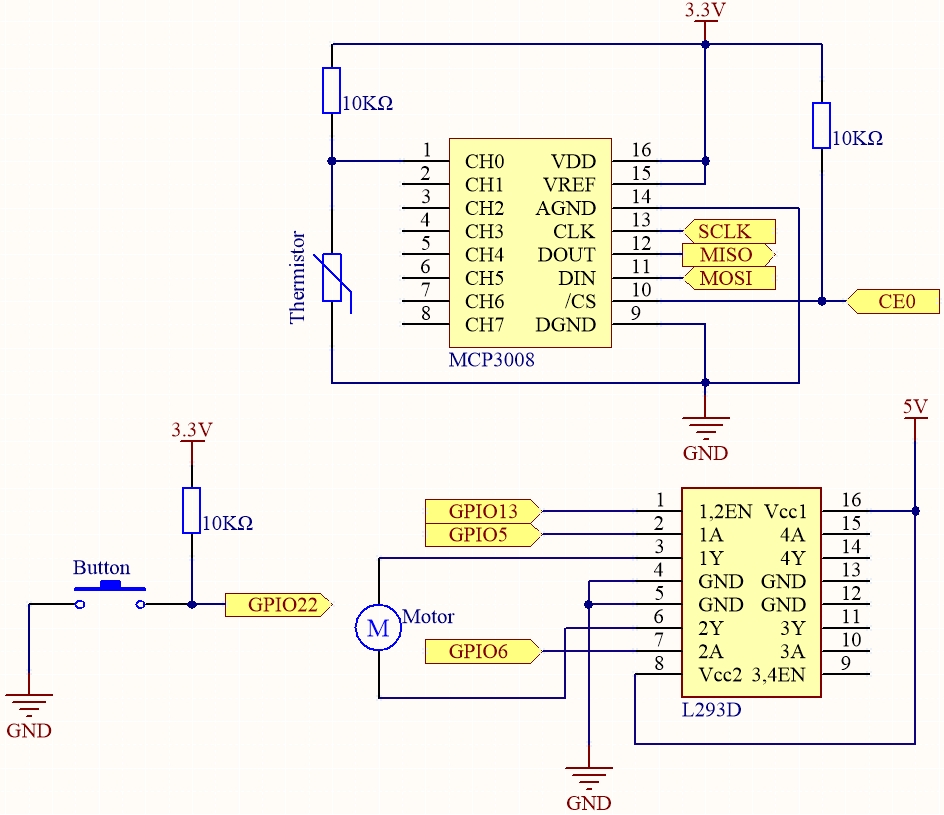
Schéma
Nom T-Board |
physique |
WiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Procédure expérimentale
Étape 1 : Construire le circuit.
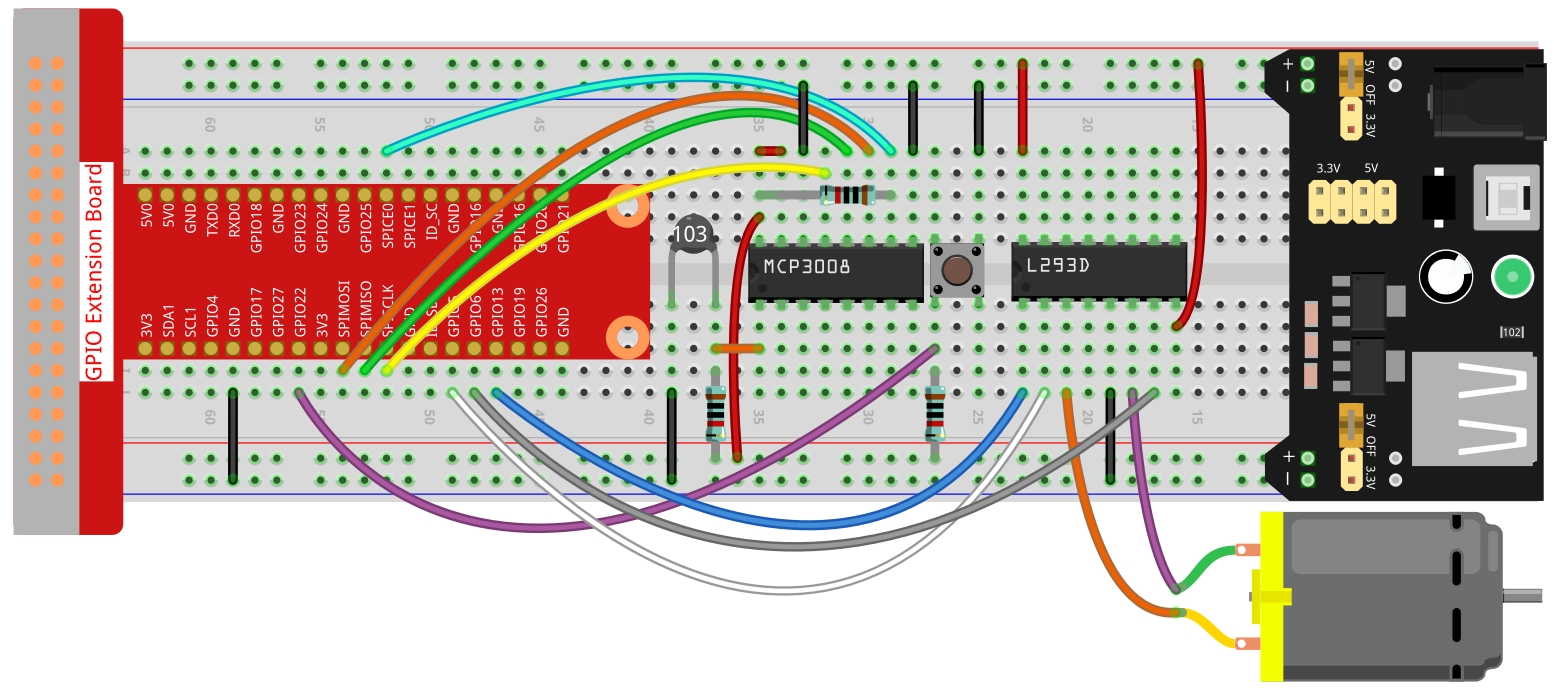
Note
Le module d’alimentation peut utiliser une pile 9 V avec le connecteur fourni dans le kit. Insérez le cavalier du module d’alimentation dans les rails 5 V de la breadboard.

Étape 2 : Configurer l’interface SPI et installer la bibliothèque spidev (voir Configuration SPI pour des instructions détaillées).
Si vous avez déjà effectué ces étapes, vous pouvez les ignorer.
Étape 3 : Accéder au dossier du code.
cd ~/raphael-kit/python
Étape 4 : Exécuter.
sudo python3 4.1.10-2_SmartFan.py
Lorsque le code s’exécute, démarrez le ventilateur en appuyant sur le bouton. À chaque appui, un niveau de vitesse est augmenté ou diminué. Il y a 5 niveaux de vitesse : 0 ~ 4. Lorsqu’il est réglé au 4e niveau et que vous appuyez sur le bouton, le ventilateur s’arrête (vitesse 0).
Dès que la température monte ou descend de plus de 2 °C, la vitesse augmente ou diminue automatiquement d’un niveau.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci‑dessous.
Mais avant cela, vous devez aller dans le chemin du code source comme raphael-kit/python.
Après modification, vous pouvez exécuter directement le code pour voir l’effet.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
# Configuration des broches
BTN_PIN = 22 # Bouton
MOTOR_IN1 = 5 # Moteur avant
MOTOR_IN2 = 6 # Moteur arrière
MOTOR_EN = 13 # Broche PWM
# Configuration GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(MOTOR_IN1, GPIO.OUT)
GPIO.setup(MOTOR_IN2, GPIO.OUT)
GPIO.setup(MOTOR_EN, GPIO.OUT)
# Configuration PWM pour le moteur
pwm = GPIO.PWM(MOTOR_EN, 1000) # 1 kHz
pwm.start(0)
# Initialiser SPI pour MCP3008
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000
# Variables globales
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
Rt = 10000.0 * Vr / (3.3 - Vr)
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
Cel = tempK - 273.15
return Cel
def motor_run(level):
if level == 0:
GPIO.output(MOTOR_IN1, GPIO.LOW)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(0)
return 0
if level >= 4:
level = 4
GPIO.output(MOTOR_IN1, GPIO.HIGH)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(level * 25)
return level
def changeLevel(channel):
global level, currentTemp, markTemp
print("Bouton pressé")
level = (level + 1) % 5
markTemp = currentTemp
# Détection de l’événement bouton
GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
def main():
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
time.sleep(0.2)
try:
main()
except KeyboardInterrupt:
pass
finally:
pwm.stop()
GPIO.cleanup()
spi.close()
Explication du code
Importation des modules nécessaires :
RPi.GPIOpour le contrôle GPIO (bouton et moteur)spidevpour communiquer avec le MCP3008timepour la gestion du délaimathpour le calcul de la température
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math
Configuration des broches :
Bouton sur GPIO22 (avec résistance pull-up interne)
Moteur contrôlé par GPIO5 (avant), GPIO6 (arrière) et GPIO13 (PWM)
BTN_PIN = 22 MOTOR_IN1 = 5 MOTOR_IN2 = 6 MOTOR_EN = 13 GPIO.setmode(GPIO.BCM) GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(MOTOR_IN1, GPIO.OUT) GPIO.setup(MOTOR_IN2, GPIO.OUT) GPIO.setup(MOTOR_EN, GPIO.OUT) pwm = GPIO.PWM(MOTOR_EN, 1000) pwm.start(0)
Communication SPI : Initialisation du bus SPI pour MCP3008 (Bus 0, CE0) à 1 MHz.
spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
Fonction ``read_adc()`` : Lecture d’une valeur analogique 10 bits (0–1023) d’un canal MCP3008 donné.
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Fonction ``temperature()`` : Convertit la tension analogique en résistance puis calcule la température en utilisant l’équation de Steinhart–Hart.
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 Rt = 10000.0 * Vr / (3.3 - Vr) tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return Cel
Fonction ``motor_run()`` :
Arrête le moteur au niveau 0
Fait tourner le moteur en avant pour les niveaux 1–4 avec un cycle PWM de 25 % à 100 %.
def motor_run(level): if level == 0: GPIO.output(MOTOR_IN1, GPIO.LOW) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(0) return 0 if level >= 4: level = 4 GPIO.output(MOTOR_IN1, GPIO.HIGH) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(level * 25) return level
Fonction ``changeLevel()`` :
Incrémente cycliquement la vitesse du moteur (0 à 4) lors d’un appui sur le bouton
Enregistre la température actuelle comme référence.
def changeLevel(channel): global level, currentTemp, markTemp print("Button pressed") level = (level + 1) % 5 markTemp = currentTemp GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
Boucle principale :
Surveille la variation de température : baisse ou hausse de plus de 2 °C
Ajuste la vitesse du moteur d’un niveau vers le bas ou vers le haut
Met à jour la vitesse toutes les 0,2 s.
def main(): global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) time.sleep(0.2)
Nettoyage (Ctrl+C) : Arrête le moteur, libère les broches GPIO et ferme SPI proprement.
try: main() except KeyboardInterrupt: pass finally: pwm.stop() GPIO.cleanup() spi.close()