Note
Bonjour et bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 sur Facebook ! Plongez plus profondément dans l’univers Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après‑vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Obtenez un accès anticipé aux annonces de nouveaux produits et aux avant‑premières.
Réductions spéciales : Profitez de remises exclusives sur nos derniers produits.
Promotions et concours festifs : Participez à des concours et promotions de vacances.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez‑nous dès aujourd’hui !
4.1.13 Moniteur de surchauffe (MCP3008)
Note
Selon la version de votre kit, veuillez identifier si vous avez ADC0834 ou MCP3008 et suivre la section correspondante.
Introduction
Vous pourriez vouloir réaliser un dispositif de surveillance de surchauffe applicable à différentes situations, par exemple, dans une usine, pour déclencher une alarme et arrêter automatiquement une machine lorsqu’un circuit surchauffe. Dans ce projet, nous allons utiliser un thermistor, un joystick, un buzzer, une LED et un écran LCD pour créer un dispositif intelligent de surveillance de la température dont le seuil est ajustable.
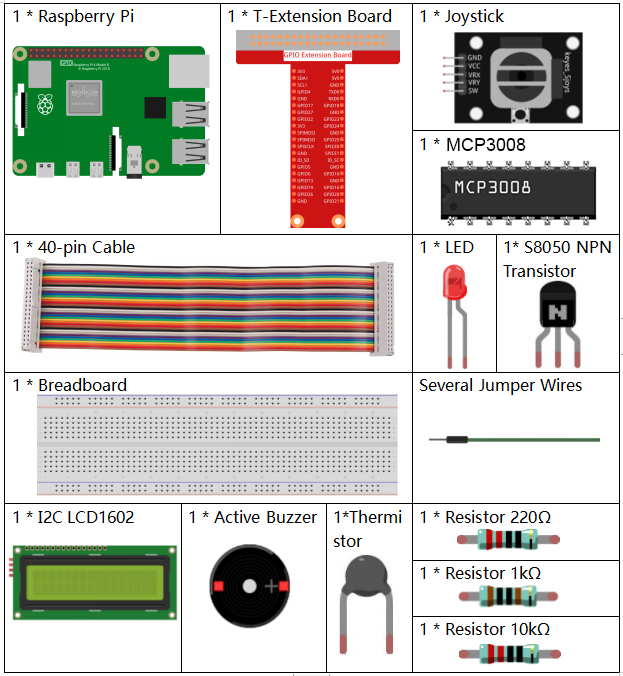
Composants requis
Dans ce projet, nous avons besoin des composants suivants :
Il est évidemment plus pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci‑dessous :
INTRODUCTION DU COMPOSANT |
LIEN D’ACHAT |
|---|---|
- |
|
- |
|
- |
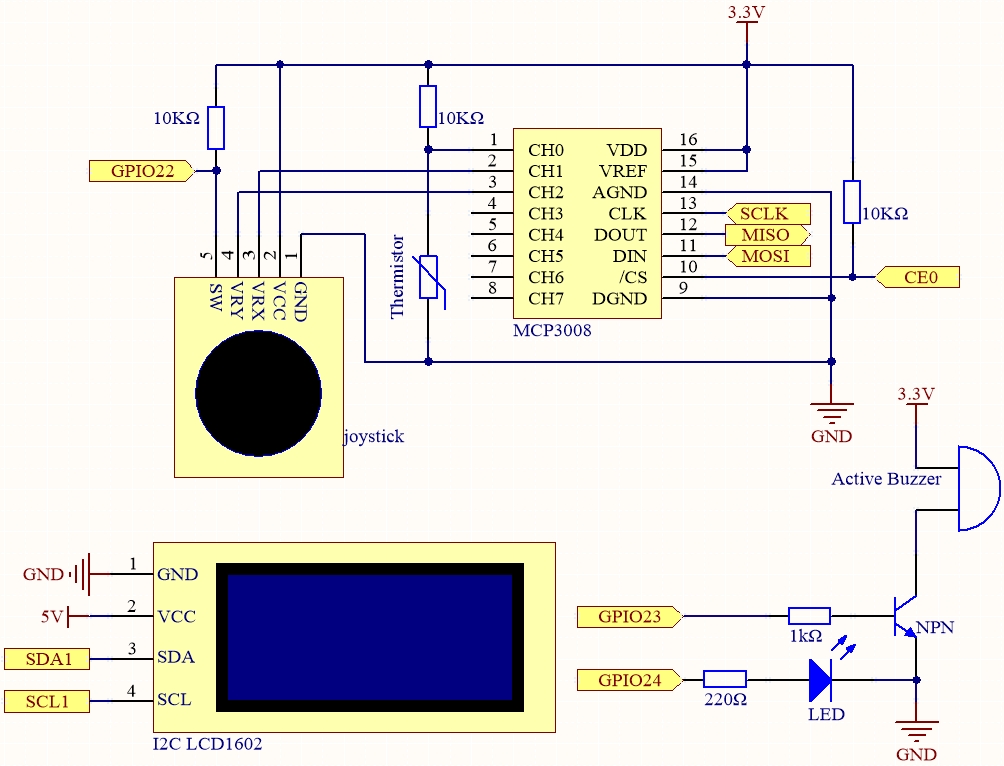
Schéma
Nom T‑Board |
physique |
WiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPISIMO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Procédure expérimentale
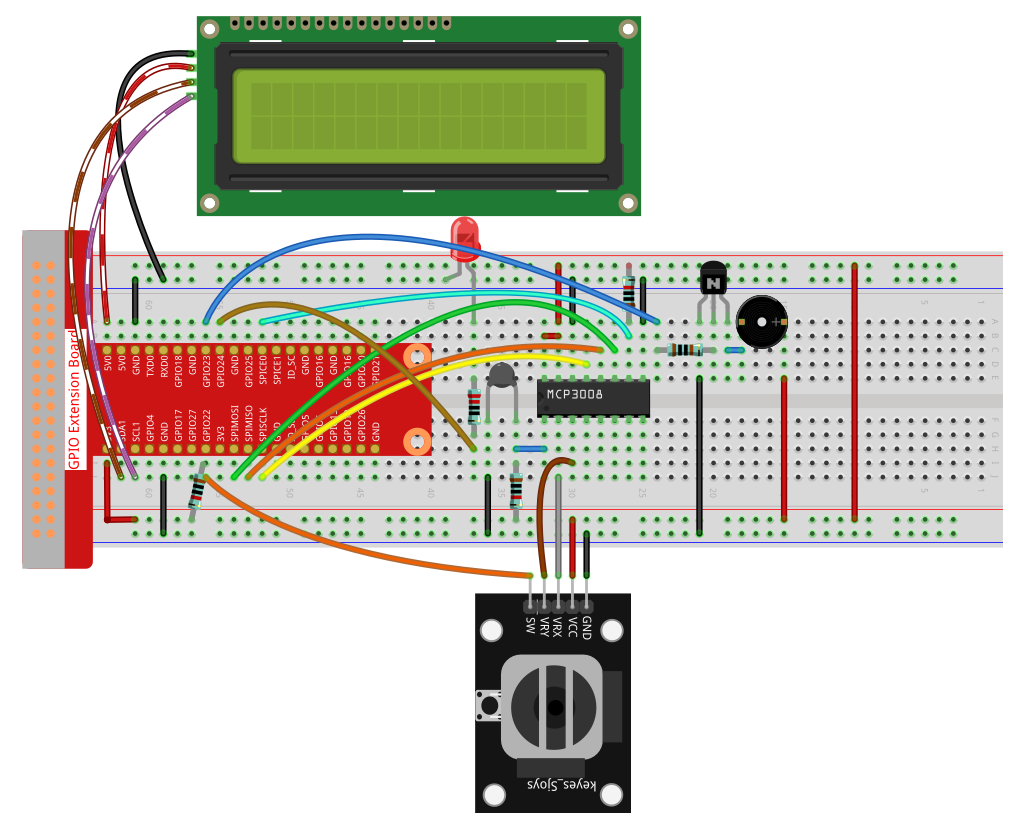
Étape 1 : Construire le circuit.
Étape 2 : Configurer l’interface SPI et installer la bibliothèque spidev (voir Configuration SPI pour des instructions détaillées).
Si vous avez déjà effectué ces étapes, vous pouvez les ignorer.
Étape 3 : Accéder au dossier du code.
cd ~/raphael-kit/python
Étape 4 : Exécuter le fichier.
sudo python3 4.1.13-2_OverheatMonitor.py
Lorsque le code s’exécute, la température actuelle et le seuil haute température 40 s’affichent sur l’écran I2C LCD1602. Si la température dépasse le seuil, le buzzer et la LED se déclenchent pour vous alerter.
Le joystick permet d’ajuster le seuil de température maximale : déplacer le joystick selon les axes X et Y augmente ou diminue ce seuil. Appuyer sur le joystick réinitialise le seuil à sa valeur initiale.
Note
Si vous obtenez l’erreur
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', reportez‑vous à Configuration I²C pour activer l’I2C.Si l’erreur
ModuleNotFoundError: No module named 'smbus2'apparaît, exécutez :sudo apt install python3-smbus2.Si l’erreur
OSError: [Errno 121] Remote I/O errorse produit, cela signifie que le module est mal câblé ou défectueux.Si le code et le câblage sont corrects, mais que l’écran LCD n’affiche toujours rien, ajustez le potentiomètre à l’arrière pour augmenter le contraste.
Avertissement
Si un message d’erreur RuntimeError: Cannot determine SOC peripheral base address s’affiche, reportez‑vous à Si « gpiozero » ne fonctionne pas..
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci‑dessous.
Mais avant cela, vous devez aller dans le chemin du code source comme raphael-kit/python.
Après modification, vous pouvez exécuter directement le code pour voir l’effet.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
import LCD1602
JOY_BTN_PIN = 22 # Broche bouton
BUZZER_PIN = 23 # Broche buzzer
LED_PIN = 24 # Broche LED
GPIO.setmode(GPIO.BCM)
GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(BUZZER_PIN, GPIO.OUT)
GPIO.setup(LED_PIN, GPIO.OUT)
upperTem = 40
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000
LCD1602.init(0x27, 1)
def read_adc(channel):
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
return ((adc[1] & 0x03) << 8) | adc[2]
def get_joystick_value():
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
LCD1602.write(0, 1, str(upperTem))
LCD1602.write(len(str(upperTem)), 1, ' ')
time.sleep(0.1)
def temperature():
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
if Vr == 0:
return 0
Rt = 10000.0 * (3.3 - Vr) / Vr
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
return round(tempK - 273.15, 2)
def monitoring_temp():
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
GPIO.output(BUZZER_PIN, GPIO.HIGH)
GPIO.output(LED_PIN, GPIO.HIGH)
else:
GPIO.output(BUZZER_PIN, GPIO.LOW)
GPIO.output(LED_PIN, GPIO.LOW)
try:
lastState = GPIO.input(JOY_BTN_PIN)
stage = 0
while True:
currentState = GPIO.input(JOY_BTN_PIN)
if currentState == GPIO.HIGH and lastState == GPIO.LOW:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
pass
finally:
LCD1602.clear()
GPIO.cleanup()
spi.close()
Explication du code
Importation des bibliothèques : GPIO pour le contrôle des broches, SPI pour l’ADC, LCD pour l’affichage, etc.
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math import LCD1602
Configuration des broches GPIO : bouton du joystick, buzzer et LED.
JOY_BTN_PIN = 22 # Button pin BUZZER_PIN = 23 # Buzzer pin LED_PIN = 24 # LED pin GPIO.setmode(GPIO.BCM) GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(BUZZER_PIN, GPIO.OUT) GPIO.setup(LED_PIN, GPIO.OUT)
Initialisation du bus SPI et de l’écran LCD1602.
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
Lecture des valeurs analogiques (read_adc) via MCP3008.
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Lecture du joystick (get_joystick_value) : ajuste le seuil selon le mouvement.
def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
Réglage du seuil (upper_tem_setting) et affichage sur l’écran.
def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
Lecture de la température (temperature) : conversion tension → résistance → température via Steinhart‑Hart.
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 if Vr == 0: return 0 Rt = 10000.0 * (3.3 - Vr) / Vr tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return round(Cel, 2)
Surveillance de la température (monitoring_temp) : affichage et déclenchement du buzzer/LED si dépassement.
def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: GPIO.output(BUZZER_PIN, GPIO.HIGH) GPIO.output(LED_PIN, GPIO.HIGH) else: GPIO.output(BUZZER_PIN, GPIO.LOW) GPIO.output(LED_PIN, GPIO.LOW)
Boucle principale : bascule entre le mode réglage et le mode surveillance par pression sur le joystick.
try: lastState = GPIO.input(JOY_BTN_PIN) stage = 0 while True: currentState = GPIO.input(JOY_BTN_PIN) if currentState == GPIO.HIGH and lastState == GPIO.LOW: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
Nettoyage final : arrêt du SPI, libération des GPIO et effacement de l’écran LCD.
except KeyboardInterrupt: pass finally: LCD1602.clear() GPIO.cleanup() spi.close()