Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
4.1.8 Bienvenue
Introduction
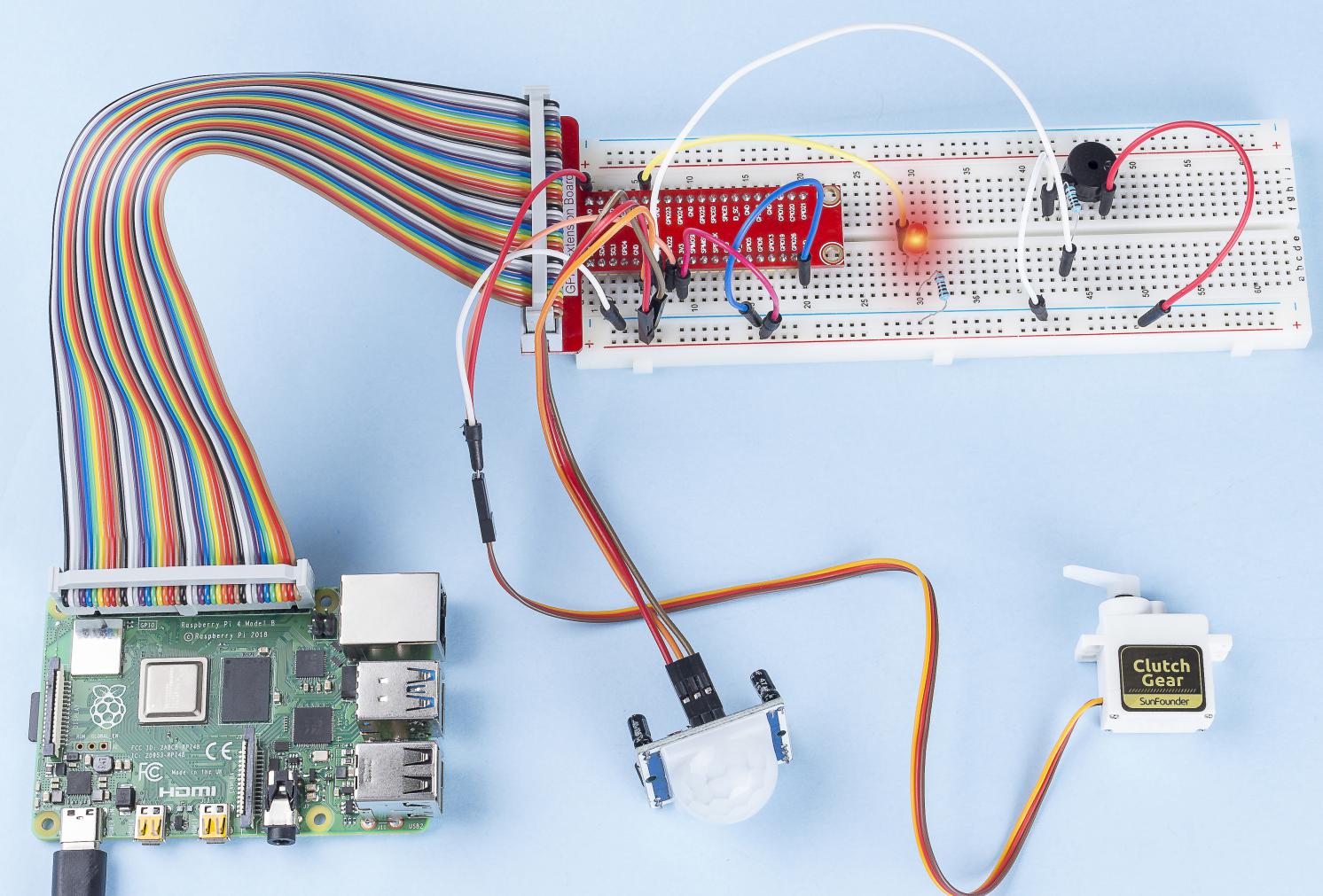
Dans ce projet, nous utiliserons un PIR pour détecter le mouvement des piétons, et utiliserons des servomoteurs, une LED et un buzzer pour simuler le fonctionnement de la porte capteur d’un magasin de proximité. Lorsque le piéton apparaît dans la zone de détection du PIR, le voyant s’allume, la porte s’ouvre et le buzzer joue une sonnerie d’ouverture.
Composants nécessaires
Pour ce projet, nous avons besoin des composants suivants.
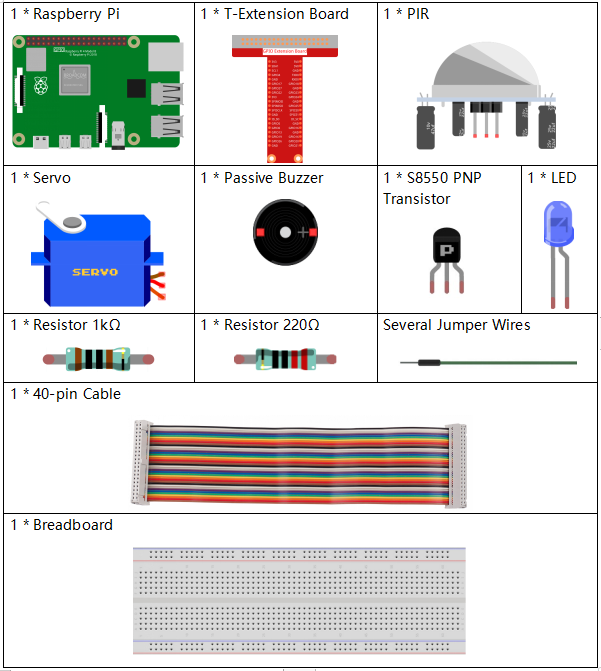
Il est vraiment pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
- |
|
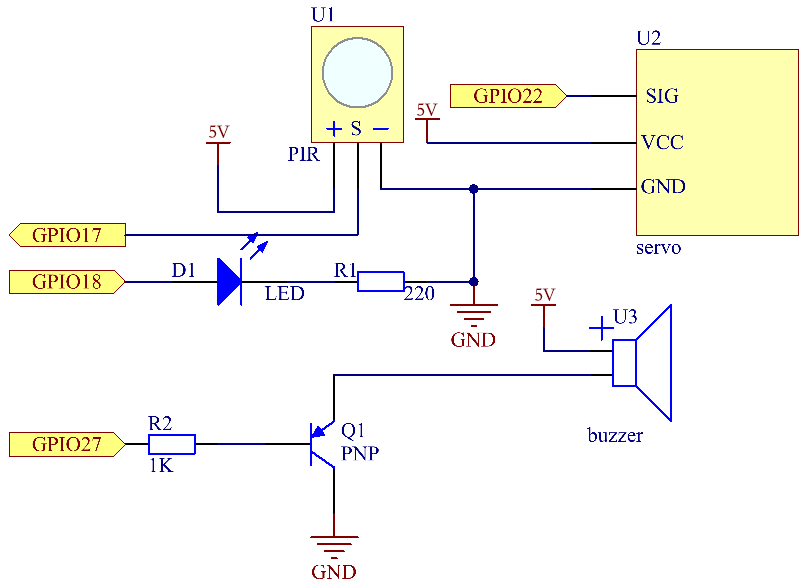
Schéma de câblage
Nom de la carte |
physique |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procédures expérimentales
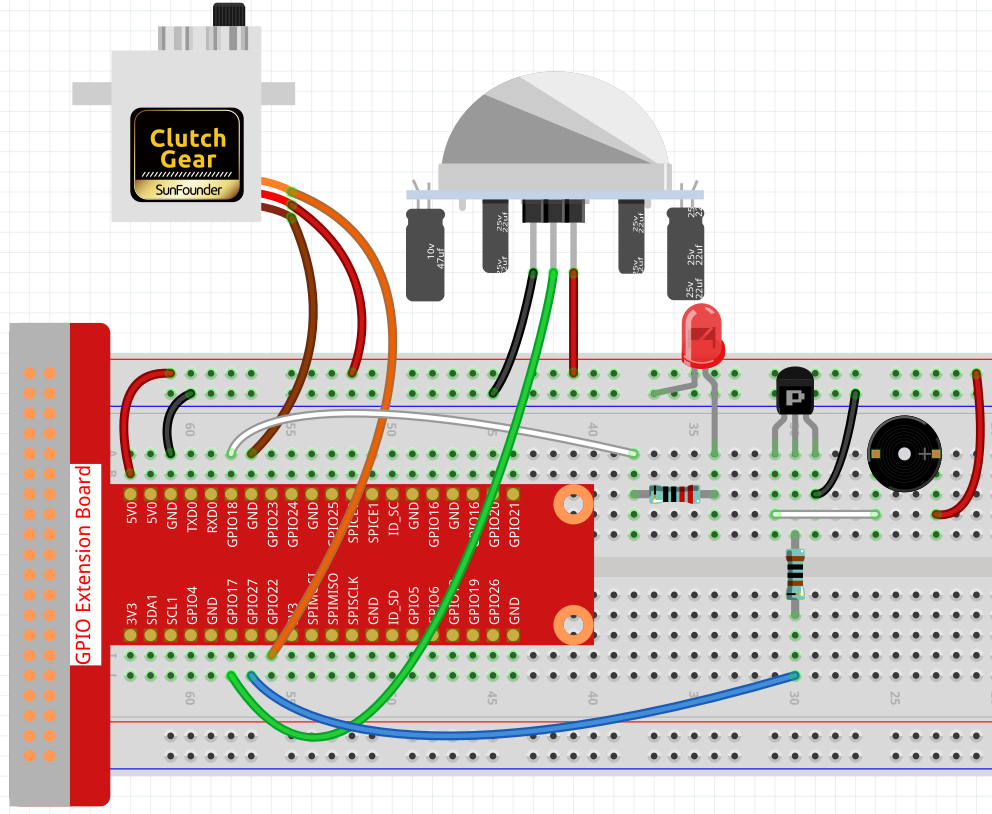
Étape 1 : Construisez le circuit.
Étape 2 : Changez de répertoire.
cd ~/raphael-kit/python/
Étape 3 : Exécutez.
sudo python3 4.1.8_Welcome.py
Après l’exécution du code, si le capteur PIR détecte quelqu’un passant à proximité, la porte s’ouvrira automatiquement (simulée par le servomoteur), l’indicateur s’allumera et la musique de la sonnette jouera. Une fois la musique terminée, le système fermera automatiquement la porte et éteindra l’indicateur, en attendant la prochaine détection de mouvement.
Il y a deux potentiomètres sur le module PIR : l’un pour ajuster la sensibilité et l’autre pour ajuster la distance de détection. Pour optimiser le fonctionnement du module PIR, vous devez tourner les deux à fond dans le sens antihoraire.

Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez aller dans le chemin du code source comme raphael-kit/python. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import time
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ledPin = 18 # define the ledPin
pirPin = 17 # define the sensorPin
servoPin = 22 # define the servoPin
buzPin = 27 # define the buzzerpin
CL = [0, 131, 147, 165, 175, 196, 211, 248] # Frequency of Low C notes
CM = [0, 262, 294, 330, 350, 393, 441, 495] # Frequency of Middle C notes
CH = [0, 525, 589, 661, 700, 786, 882, 990] # Frequency of High C notes
song = [ CH[5],CH[2],CM[6],CH[2],CH[3],CH[6],CH[3],CH[5],CH[3],CM[6],CH[2] ]
beat = [ 1,1,1,1,1,2,1,1,1,1,1,]
def setup():
global p
global Buzz # Assign a global variable to replace GPIO.PWM
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by physical location
GPIO.setup(ledPin, GPIO.OUT) # Set ledPin's mode is output
GPIO.setup(pirPin, GPIO.IN) # Set sensorPin's mode is input
GPIO.setup(servoPin, GPIO.OUT) # Set servoPin's mode is output
GPIO.output(servoPin, GPIO.LOW) # Set servoPin to low
GPIO.setup(buzPin, GPIO.OUT) # Set pins' mode is output
Buzz = GPIO.PWM(buzPin, 440) # 440 is initial frequency.
Buzz.start(50) # Start Buzzer pin with 50% duty ration
p = GPIO.PWM(servoPin, 50) # set Frequece to 50Hz
p.start(0) # Duty Cycle = 0
def map(value, inMin, inMax, outMin, outMax):
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
def doorbell():
for i in range(1, len(song)): # Play song 1
Buzz.ChangeFrequency(song[i]) # Change the frequency along the song note
time.sleep(beat[i] * 0.25) # delay a note for beat * 0.25s
time.sleep(1) # Wait a second for next song.
def closedoor():
GPIO.output(ledPin, GPIO.LOW)
for i in range(180, -1, -1): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
time.sleep(1)
def opendoor():
GPIO.output(ledPin, GPIO.HIGH)
for i in range(0, 181, 1): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.001)
time.sleep(1)
doorbell()
closedoor()
def loop():
while True:
if GPIO.input(pirPin)==GPIO.HIGH:
opendoor()
def destroy():
GPIO.cleanup() # Release resource
p.stop()
Buzz.stop()
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
Explication du code
def setup():
global p
global Buzz # Assign a global variable to replace GPIO.PWM
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by physical location
GPIO.setup(ledPin, GPIO.OUT) # Set ledPin's mode is output
GPIO.setup(pirPin, GPIO.IN) # Set sensorPin's mode is input
GPIO.setup(buzPin, GPIO.OUT) # Set pins' mode is output
Buzz = GPIO.PWM(buzPin, 440) # 440 is initial frequency.
Buzz.start(50) # Start Buzzer pin with 50% duty ration
GPIO.setup(servoPin, GPIO.OUT) # Set servoPin's mode is output
GPIO.output(servoPin, GPIO.LOW) # Set servoPin to low
p = GPIO.PWM(servoPin, 50) # set Frequece to 50Hz
p.start(0) # Duty Cycle = 0
Ces instructions servent à initialiser les broches de chaque composant.
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
Créer une fonction, servowrite, pour écrire l’angle dans le servo, entre 0 et 180 degrés. .. code-block:: python
- def doorbell():
- for i in range(1,len(song)): # Play song1
Buzz.ChangeFrequency(song[i]) # Change the frequency along the song note time.sleep(beat[i] * 0.25) # delay a note for beat * 0.25s
Créer une fonction, doorbell, pour permettre au buzzer de jouer de la musique.
def closedoor():
GPIO.output(ledPin, GPIO.LOW)
Buzz.ChangeFrequency(1)
for i in range(180, -1, -1): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
Fermer la porte et éteindre la lumière indicatrice.
def opendoor():
GPIO.output(ledPin, GPIO.HIGH)
for i in range(0, 181, 1): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.001)
doorbell()
closedoor()
La fonction, opendoor() se compose de plusieurs parties : allumer la lumière indicatrice,
faire tourner le servo (pour simuler l’action d’ouverture de la porte), jouer la musique de la
sonnette du magasin de proximité, et appeler la fonction, closedoor() après avoir joué de
la musique.
def loop():
while True:
if GPIO.input(pirPin)==GPIO.HIGH:
opendoor()
Lorsque le PIR détecte qu’une personne passe, il appelle la fonction, opendoor() .
Image du phénomène