Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
4.1.15 Alarme
Introduction
Dans ce projet, nous allons créer un dispositif d’alarme manuel. Vous pouvez remplacer l’interrupteur à bascule par un thermistor ou un capteur photosensible pour créer une alarme de température ou de lumière.
Composants Requis
Pour ce projet, nous avons besoin des composants suivants.
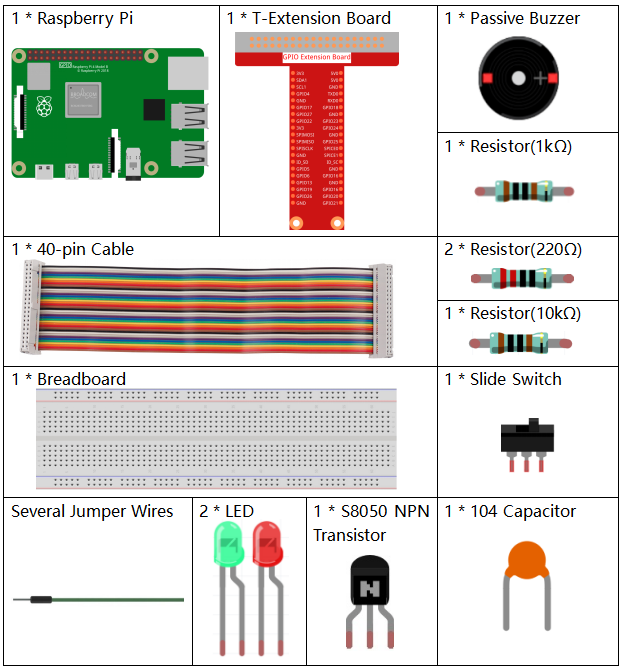
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION DU COMPOSANT |
LIEN D’ACHAT |
|---|---|
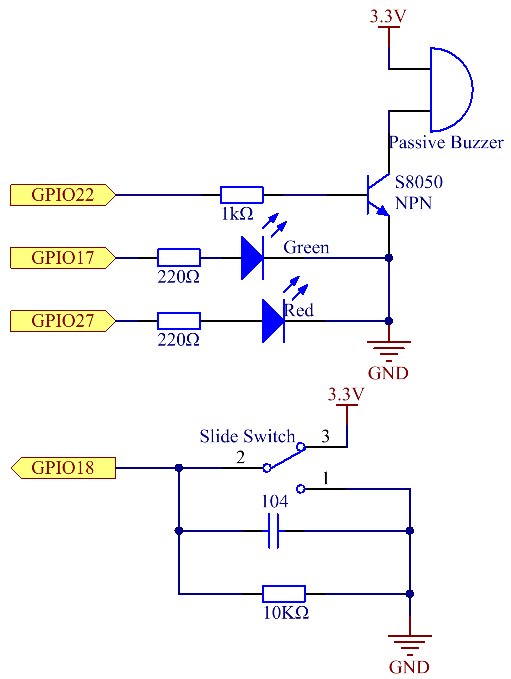
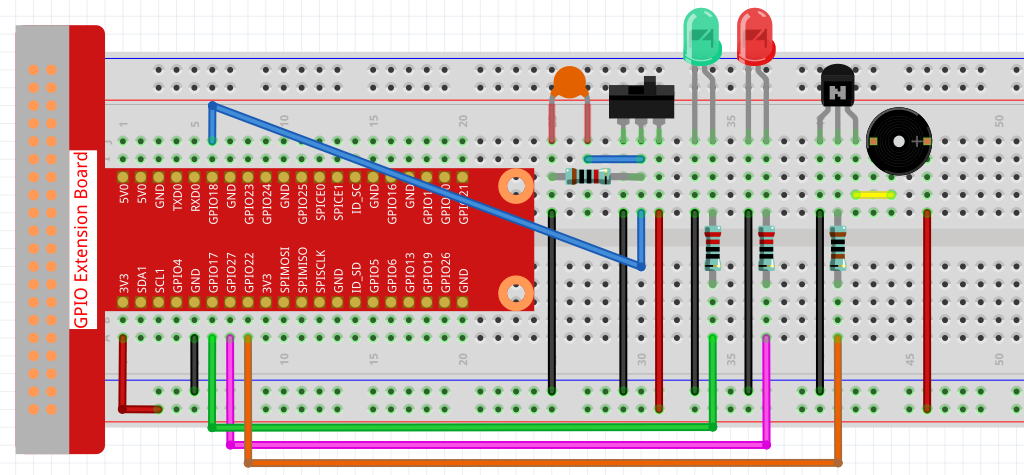
Schéma de Câblage
Nom T-Board |
physique |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procédures Expérimentales
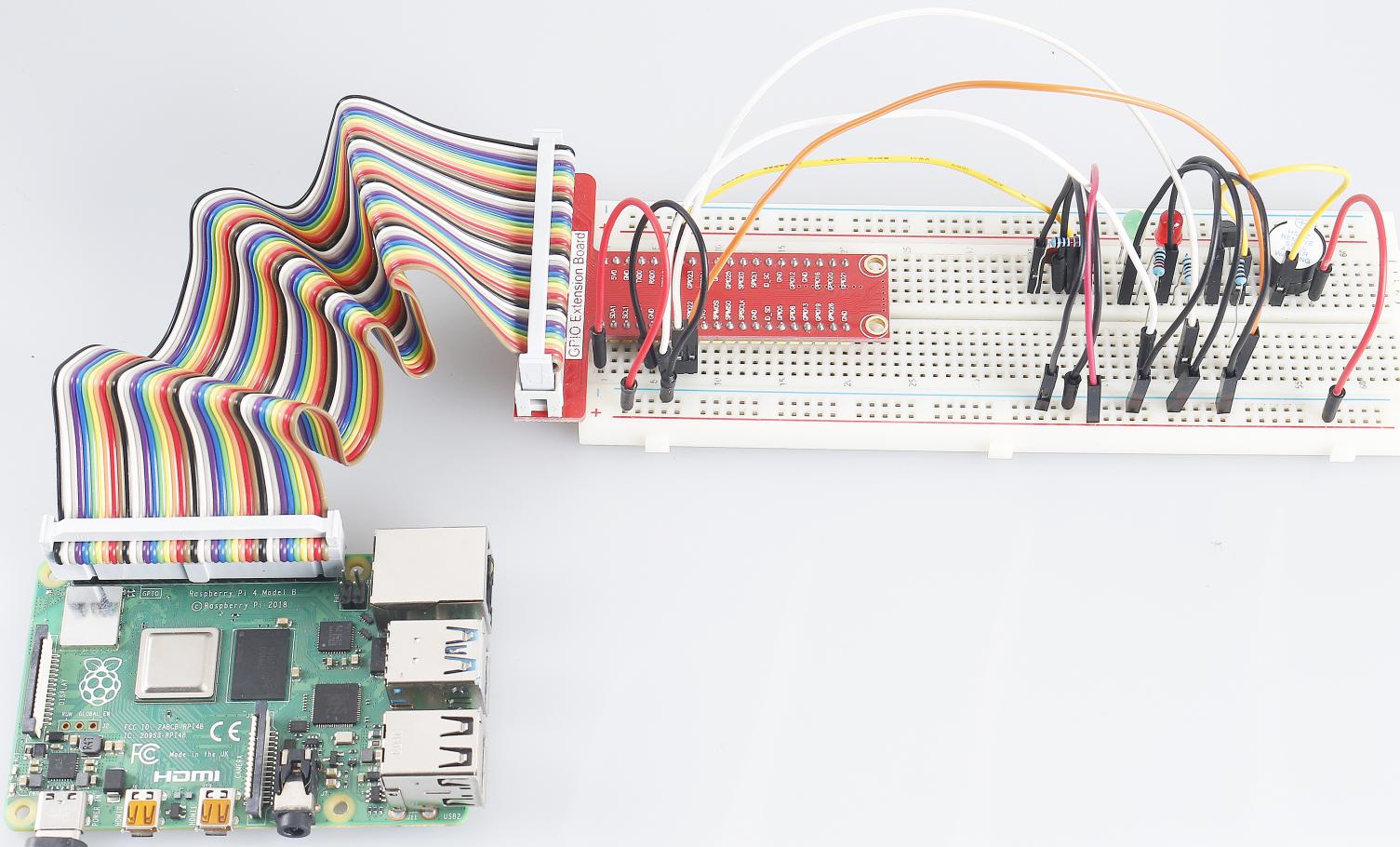
Étape 1 : Construisez le circuit.
Étape 2 : Changez de répertoire.
cd ~/raphael-kit/python/
Étape 3 : Exécutez.
sudo python3 4.1.15_AlarmBell.py
Après le démarrage du programme, l’interrupteur à bascule sera basculé vers la droite et le buzzer émettra des sons d’alarme. En même temps, les LED rouges et vertes clignoteront à une certaine fréquence.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez aller dans le chemin du code source comme raphael-kit/python.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import time
import threading
BeepPin=22
ALedPin=17
BLedPin=27
switchPin=18
Buzz=0
flag =0
note=150
pitch=20
def setup():
GPIO.setmode(GPIO.BCM)
GPIO.setup(BeepPin, GPIO.OUT)
GPIO.setup(ALedPin,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(BLedPin,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(switchPin,GPIO.IN)
global Buzz
Buzz=GPIO.PWM(BeepPin,note)
def ledWork():
while flag:
GPIO.output(ALedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(BLedPin,GPIO.LOW)
def buzzerWork():
global pitch
global note
while flag:
if note >= 800 or note <=130:
pitch = -pitch
note = note + pitch
Buzz.ChangeFrequency(note)
time.sleep(0.01)
def on():
global flag
flag = 1
Buzz.start(50)
tBuzz = threading.Thread(target=buzzerWork)
tBuzz.start()
tLed = threading.Thread(target=ledWork)
tLed.start()
def off():
global flag
flag = 0
Buzz.stop()
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.LOW)
def main():
lastState=0
while True:
currentState =GPIO.input(switchPin)
if currentState == 1 and lastState == 0:
on()
elif currentState == 0 and lastState == 1:
off()
lastState=currentState
def destroy():
off()
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
main()
except KeyboardInterrupt:
destroy()
Explication du Code
import threading
Ici, nous importons le module Threading qui permet d’exécuter plusieurs tâches en même temps,
alors que les programmes normaux ne peuvent exécuter le code que de haut en bas. Avec les modules
Threading, la LED et le buzzer peuvent fonctionner séparément.
def ledWork():
while flag:
GPIO.output(ALedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(BLedPin,GPIO.LOW)
La fonction ledWork() aide à définir l’état de fonctionnement de ces 2 LED : elle maintient
la LED verte allumée pendant 0,5 s puis l’éteint ; de même, elle maintient la LED rouge allumée
pendant 0,5 s puis l’éteint.
def buzzerWork():
global pitch
global note
while flag:
if note >= 800 or note <=130:
pitch = -pitch
note = note + pitch
Buzz.ChangeFrequency(note)
time.sleep(0.01)
La fonction buzzWork() est utilisée pour définir l’état de fonctionnement du buzzer.
Ici, nous définissons la fréquence entre 130 et 800, pour accumuler ou diminuer à un
intervalle de 20.
def on():
global flag
flag = 1
Buzz.start(50)
tBuzz = threading.Thread(target=buzzerWork)
tBuzz.start()
tLed = threading.Thread(target=ledWork)
tLed.start()
Dans la fonction on() :
Définir le marqueur « flag=1 », indiquant la fin du thread de contrôle.
Démarrer le Buzz et régler le cycle de service à 50 %.
Créer 2 threads distincts pour que la LED et le buzzer puissent fonctionner en même temps.
La fonction threading.Thread() est utilisée pour créer le thread et son prototype est le suivant :
class threading.Thread(group=None, target=None, name=None, args=(), kwargs={}, *, daemon=None)
Parmi les méthodes de construction, le paramètre principal est target, nous devons assigner un objet appelable (ici les fonctions ledWork et BuzzWork) à target.
Ensuite, start() est appelé pour démarrer l’objet thread, par exemple, tBuzz.start()
est utilisé pour démarrer le thread nouvellement installé tBuzz.
def off():
global flag
flag = 0
Buzz.stop()
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.LOW)
La fonction Off() définit « flag=0 » afin de quitter les threads
ledWork et BuzzWork et ensuite éteindre le buzzer et les LED.
def main():
lastState=0
while True:
currentState =GPIO.input(switchPin)
if currentState == 1 et lastState == 0:
on()
elif currentState == 0 et lastState == 1:
off()
lastState=currentState
Main() contient l’ensemble du processus du programme : d’abord lire la valeur de
l’interrupteur à glissière ; si l’interrupteur à bascule est basculé vers la droite
(la lecture est 1), la fonction on() est appelée, le buzzer est actionné pour émettre
des sons et les LED rouges et vertes clignotent. Sinon, le buzzer et les LED ne fonctionnent pas.
Image du Phénomène