Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Löse Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezielle Rabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu erkunden und zu kreieren? Klicke auf [hier] und trete heute bei!
7.5 Erstellen eines „10-Sekunden“-Spiels
In diesem spannenden Projekt werden wir ein unterhaltsames Spiel namens „10 Sekunden“ mit dem Raspberry Pi Pico 2, einem Neigungsschalter und einer 4-stelligen 7-Segment-Anzeige bauen. Das Ziel des Spiels ist es, einen Zauberstab (simuliert durch den am Stab befestigten Neigungsschalter) zu schütteln, um einen Timer zu starten, und ihn dann erneut zu schütteln, um den Timer möglichst genau bei 10,00 Sekunden zu stoppen. Es ist eine großartige Möglichkeit, deine Zeitgefühl-Fähigkeiten zu testen und Freunde herauszufordern, wer der wahre Zeitzauberer ist!
Was Sie benötigen
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Newton Lab Kit |
450+ |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
5(4-220Ω, 1-10KΩ) |
||
6 |
1 |
||
7 |
1 |
||
8 |
1 |
Verständnis der Komponenten
Neigungsschalter: Ein Sensor, der Orientierung oder Bewegung erkennt. Wenn geneigt, schließt oder unterbricht er einen Stromkreis, was es uns ermöglicht, Schütteln oder Bewegung zu erkennen.
4-stellige 7-Segment-Anzeige: Zeigt Zahlen von 0000 bis 9999 an. Wir verwenden Schieberegister, um die Anzeige mit weniger GPIO-Pins zu steuern.
74HC595 Schieberegister: 8-Bit-Serien-in, Parallel-out-Schieberegister, das es uns ermöglicht, mehrere Ausgänge mit nur wenigen GPIO-Pins zu steuern.
Schaltplan
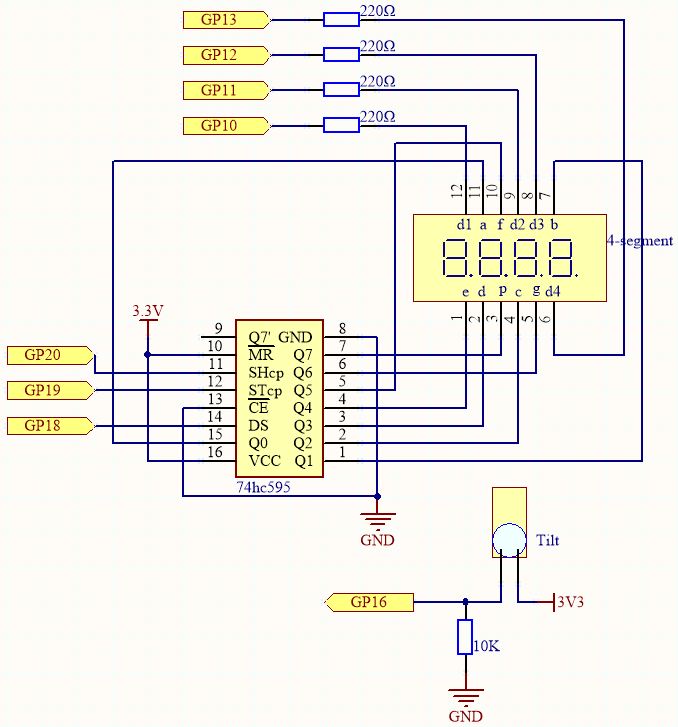
Dieser Schaltkreis basiert auf 5.3 Erstellung eines Zeitmessers mit einem 4-stelligen 7-Segment-Display mit der Ergänzung eines Neigungsschalters.
GP16 ist hoch, wenn der Neigungsschalter aufrecht steht; niedrig, wenn geneigt.
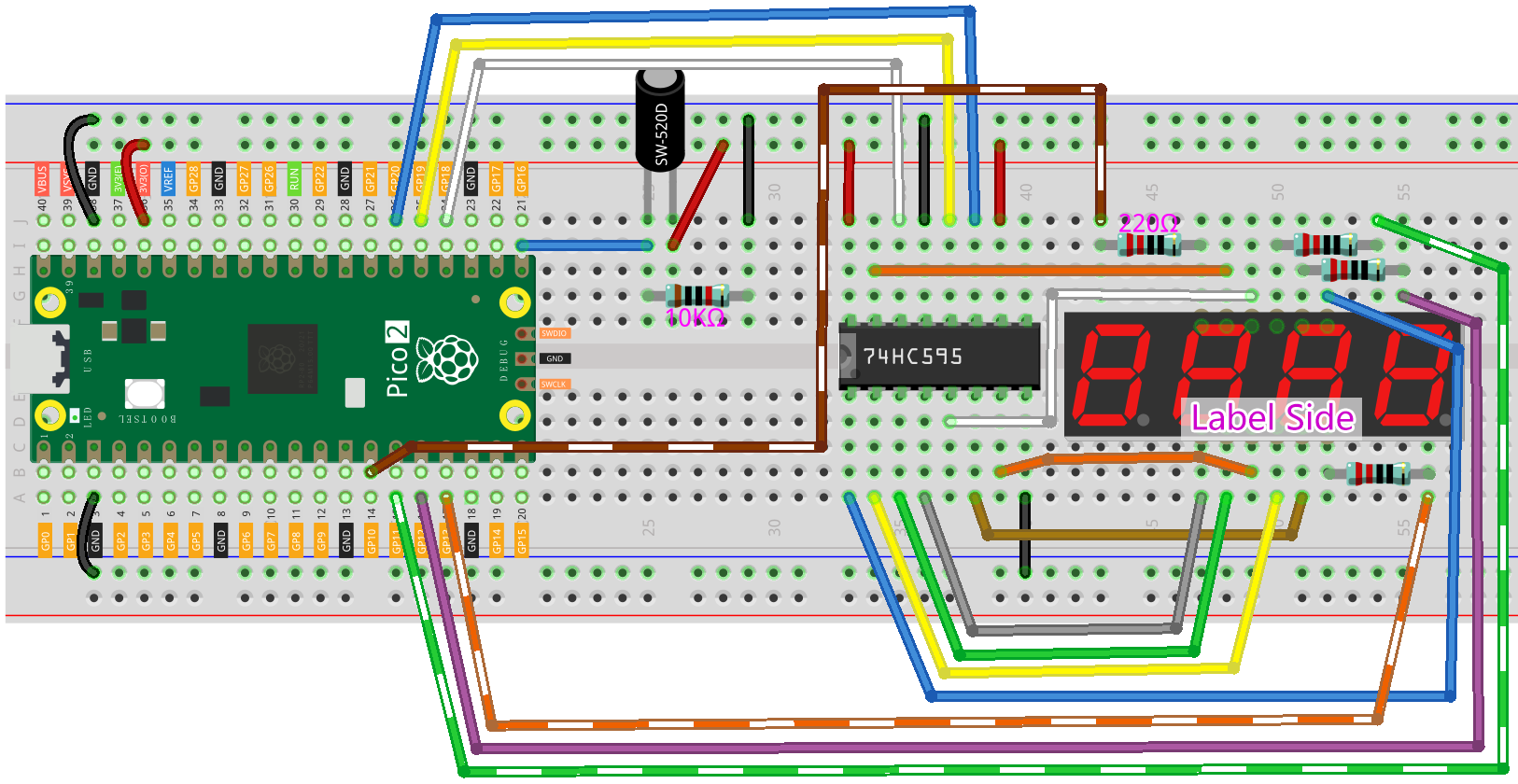
Verdrahtungsplan
Code schreiben
Wir werden ein MicroPython-Skript schreiben, das:
Das Schütteln mit dem Neigungsschalter erkennt.
Einen Timer basierend auf dem Neigungsschalter startet und stoppt.
Die verstrichene Zeit auf der 4-stelligen 7-Segment-Anzeige anzeigt.
Multiplexing und Schieberegister verwendet, um die Anzeige zu steuern.
from machine import Pin
import utime
# Steuerpins für 74HC595 initialisieren
SDI = machine.Pin(18, machine.Pin.OUT) # Serial Data Input (DS)
RCLK = machine.Pin(19, machine.Pin.OUT) # Register Clock (STCP)
SRCLK = machine.Pin(20, machine.Pin.OUT) # Shift Register Clock (SHCP)
# 7-Segment-Anzeigecodes für die Ziffern 0-9 (Gemeinsame Kathode)
SEGMENT_CODES = [0x3F, # 0
0x06, # 1
0x5B, # 2
0x4F, # 3
0x66, # 4
0x6D, # 5
0x7D, # 6
0x07, # 7
0x7F, # 8
0x6F] # 9
# Zifferauswahl-Pins initialisieren (Gemeinsame Kathoden)
digit_pins = [
machine.Pin(10, machine.Pin.OUT), # Ziffer 1
machine.Pin(11, machine.Pin.OUT), # Ziffer 2
machine.Pin(12, machine.Pin.OUT), # Ziffer 3
machine.Pin(13, machine.Pin.OUT) # Ziffer 4
]
# Neigungsschalter initialisieren
tilt_switch = Pin(16, Pin.IN, Pin.PULL_DOWN)
# Variablen für die Zeitmessung
start_time = 0
elapsed_time = 0
counting = False
# Funktion, um Daten an die Schieberegister auszugeben
def shift_out(data):
RCLK.low()
for bit in range(7, -1, -1):
SRCLK.low()
bit_val = (data >> bit) & 0x01
SDI.value(bit_val)
SRCLK.high()
RCLK.high()
# Funktion, um eine Ziffer an einer bestimmten Position anzuzeigen
def display_digit(position, digit):
# Alle Ziffern ausschalten
for dp in digit_pins:
dp.high()
# Segmentdaten senden
shift_out(SEGMENT_CODES[digit])
# Die ausgewählte Ziffer aktivieren (gemeinsame Kathode ist aktiv niedrig)
digit_pins[position].low()
# Kleine Verzögerung, um die Ziffer sichtbar zu machen
utime.sleep_ms(5)
# Die Ziffer ausschalten
digit_pins[position].high()
# Funktion, um die verstrichene Zeit anzuzeigen
def display_time(time_ms):
# Zeit in Hundertstelsekunden umrechnen (Hundertstel einer Sekunde)
centiseconds = int(time_ms / 10)
# Auf 9999 begrenzen, um auf das Display zu passen
if centiseconds > 9999:
centiseconds = 9999
# Einzelne Ziffern extrahieren
digits = [
(centiseconds // 1000) % 10,
(centiseconds // 100) % 10,
(centiseconds // 10) % 10,
centiseconds % 10
]
# Jede Ziffer schnell anzeigen
for i in range(4):
display_digit(i, digits[i])
# Interrupt-Handler für den Neigungsschalter
def tilt_handler(pin):
global counting, start_time, elapsed_time
if not counting:
# Beginne mit der Zeitmessung
counting = True
start_time = utime.ticks_ms()
else:
# Beende die Zeitmessung
counting = False
elapsed_time = utime.ticks_diff(utime.ticks_ms(), start_time)
# Interrupt für den Neigungsschalter einrichten
tilt_switch.irq(trigger=Pin.IRQ_RISING, handler=tilt_handler)
# Hauptloop
while True:
if counting:
# Verstrichene Zeit berechnen
current_time = utime.ticks_diff(utime.ticks_ms(), start_time)
display_time(current_time)
else:
# Die endgültige Zeit anzeigen
display_time(elapsed_time)
Wenn der Code läuft, sollte das 4-stellige 7-Segment-Display initialisieren und 00.00 anzeigen.
Timer starten:
Schütteln Sie den Zauberstab oder neigen Sie den Neigungsschalter, um den Interrupt auszulösen.
Der Timer beginnt ab 00.00 zu zählen.
Timer stoppen:
Schütteln Sie den Zauberstab oder neigen Sie den Schalter erneut.
Der Timer stoppt und zeigt die Endzeit an.
Ziel:
Versuchen Sie, den Timer so nah wie möglich an 10,00 Sekunden zu stoppen.
Fordern Sie Freunde heraus, um zu sehen, wer am nächsten kommt!
Verständnis des Codes
Importe und Pin-Definitionen:
machine.Pin: Zur Steuerung von GPIO-Pins.utime: Für Timing-Funktionen.Definieren Sie SDI, SRCLK und RCLK-Pins zur Steuerung der Schieberegister.
Initialisieren Sie den Neigungsschalter auf GP16 mit einem Pull-Down-Widerstand.
Segment- und Zifferncodes:
SEGMENT_CODES: Eine Liste mit den Binärcodes zur Anzeige der Ziffern 0-9 auf einem 7-Segment-Display.digit_pins: Codes zur Auswahl jeder Ziffer des Displays. Aktiv LOW für Displays mit gemeinsamer Kathode.
# 7-Segment-Anzeigecodes für die Ziffern 0-9 (gemeinsame Kathode) SEGMENT_CODES = [0x3F, # 0 0x06, # 1 0x5B, # 2 0x4F, # 3 0x66, # 4 0x6D, # 5 0x7D, # 6 0x07, # 7 0x7F, # 8 0x6F] # 9 # Initialisierung der Auswahlpins für Ziffern (gemeinsame Kathoden) digit_pins = [ machine.Pin(10, machine.Pin.OUT), # Ziffer 1 machine.Pin(11, machine.Pin.OUT), # Ziffer 2 machine.Pin(12, machine.Pin.OUT), # Ziffer 3 machine.Pin(13, machine.Pin.OUT) # Ziffer 4 ]
Variablen für die Zeitmessung:
start_time: Speichert den Zeitpunkt, zu dem der Timer startet.elapsed_time: Speichert die gesamte verstrichene Zeit, wenn der Timer stoppt.counting: Ein boolescher Indikator, der anzeigt, ob der Timer läuft.
Definition der Funktion
shift_out:Sendet 8 Bit Daten an den 74HC595.
Schiebt die Daten beginnend vom signifikantesten Bit (MSB).
Steuert die Schiebe- und Registeruhren entsprechend.
def shift_out(data): RCLK.low() for bit in range(7, -1, -1): SRCLK.low() bit_val = (data >> bit) & 0x01 SDI.value(bit_val) SRCLK.high() RCLK.high()
Definition der Funktion
display_digit:Schaltet alle Ziffern aus.
Sendet den Segmentcode für die Ziffer.
Aktiviert die angegebene Ziffer durch Setzen ihres Pins auf LOW.
Fügt eine kleine Verzögerung hinzu, um die Ziffer sichtbar zu machen.
Schaltet die Ziffer nach der Anzeige aus.
def display_digit(position, digit): for dp in digit_pins: dp.high() shift_out(SEGMENT_CODES[digit]) digit_pins[position].low() utime.sleep_ms(5) digit_pins[position].high()
Funktion
display_time:Wandelt die verstrichene Zeit von Millisekunden in Hundertstelsekunden um.
Teilt die Zeit in einzelne Ziffern auf.
Nutzt Multiplexing, um jede Ziffer schnell anzuzeigen.
def display_time(time_ms): # Zeit in Hundertstelsekunden umrechnen centiseconds = int(time_ms / 10) # Begrenzung auf 9999, um auf das Display zu passen if centiseconds > 9999: centiseconds = 9999 # Einzelne Ziffern extrahieren digits = [ (centiseconds // 1000) % 10, (centiseconds // 100) % 10, (centiseconds // 10) % 10, centiseconds % 10 ] # Jede Ziffer schnell anzeigen for i in range(4): display_digit(i, digits[i])
Funktion
tilt_handler:Wird durch den Interrupt des Neigungsschalters ausgelöst.
Wechselt den Zustand des Zählens.
Zeichnet
start_timeauf, wenn das Zählen beginnt.Berechnet
elapsed_time, wenn das Zählen stoppt.
def tilt_handler(pin): global counting, start_time, elapsed_time if not counting: # Beginne mit dem Zählen counting = True start_time = utime.ticks_ms() else: # Stoppe das Zählen counting = False elapsed_time = utime.ticks_diff(utime.ticks_ms(), start_time)
Hauptschleife:
Wenn
counting„True“ ist, wird die Anzeige kontinuierlich mit der aktuellen verstrichenen Zeit aktualisiert.Wenn
counting„False“ ist, wird die endgültigeelapsed_timeangezeigt.
while True: if counting: # Verstrichene Zeit berechnen current_time = utime.ticks_diff(utime.ticks_ms(), start_time) display_time(current_time) else: # Endzeit anzeigen display_time(elapsed_time)
Fehlerbehebung
Anzeigeprobleme:
Wenn das Display die Zahlen nicht korrekt anzeigt, überprüfen Sie die Segment- und Zifferncodes sowie die Verdrahtungsverbindungen.
Stellen Sie sicher, dass das Schieberegister richtig angeschlossen ist und dass die Daten in der richtigen Reihenfolge ausgegeben werden.
Empfindlichkeit des Neigungsschalters:
Wenn der Neigungsschalter zu empfindlich oder nicht empfindlich genug ist, erwägen Sie, seine Ausrichtung anzupassen oder ihn durch einen anderen Typ zu ersetzen.
Stellen Sie sicher, dass der Pull-Down-Widerstand korrekt angeschlossen ist, um Fehlauslösungen zu vermeiden.
Zeitgenauigkeit:
Der Timer basiert auf der Systemuhr, die recht genau ist, aber leichte Abweichungen aufweisen kann.
Für eine verbesserte Genauigkeit verwenden Sie ein externes Echtzeituhrmodul (RTC).
Erweiterungen und Verbesserungen
Visuelle Effekte:
Fügen Sie LEDs hinzu, die aufleuchten oder die Farbe ändern, wenn der Timer stoppt.
Verwenden Sie einen Summer, um akustisches Feedback beim Starten und Stoppen des Timers zu geben.
Highscore-Verfolgung:
Modifizieren Sie den Code, um die beste (nahe 10,00 Sekunden) erreichte Zeit zu speichern.
Zeigen Sie eine Glückwunschmeldung oder Animation für neue Highscores an.
Mehrspielermodus:
Ermöglichen Sie mehreren Spielern, sich abzuwechseln und die Zeiten jedes Spielers zu speichern.
Zeigen Sie die Spielernummern und deren jeweilige Zeiten an.
Schwierigkeitsstufen:
Führen Sie verschiedene Zielzeiten ein (z. B. 5,00 Sekunden, 15,00 Sekunden), um die Herausforderung zu erhöhen.
Randomisieren Sie die Zielzeit und zeigen Sie sie zu Beginn jeder Runde an.
Alternative Eingabemethoden:
Ersetzen Sie den Neigungsschalter durch einen Knopf oder einen anderen Sensor zum Starten und Stoppen des Timers.
Verwenden Sie einen Bewegungssensor, um spezifische Gesten zu erkennen.
Fazit
Sie haben erfolgreich ein „10-Sekunden“-Spiel mit dem Raspberry Pi Pico 2 gebaut! Dieses Projekt kombiniert Sensorik, Timing-Funktionen und Anzeigesteuerung, um ein interaktives und unterhaltsames Spiel zu schaffen. Es ist ein ausgezeichnetes Beispiel dafür, wie Mikrocontroller verwendet werden können, um spaßige und fesselnde Erlebnisse zu schaffen.
Fühlen Sie sich frei, dieses Projekt nach Ihren Wünschen anzupassen und weiterzuentwickeln. Ob Sie neue Funktionen hinzufügen, das Design verbessern oder zusätzliche Komponenten integrieren, die Möglichkeiten sind grenzenlos.