Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein – gemeinsam mit Gleichgesinnten.
Warum beitreten?
Expertenunterstützung: Erhalte Hilfe bei technischen Herausforderungen und nach dem Kauf auftretenden Problemen durch unsere Community und unser Team.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezielle Rabatte: Profitiere von exklusiven Preisnachlässen auf unsere neuesten Produkte.
Feierliche Aktionen und Gewinnspiele: Nimm an Verlosungen und saisonalen Aktionen teil.
👉 Bereit, mit uns zu entdecken und zu kreieren? Klicke auf [hier] und werde Teil unserer Community!
7.11 Bau eines Somatosensorischen Controllers
In diesem spannenden Projekt erstellen wir einen Somatosensorischen Controller mit dem Raspberry Pi Pico 2, einem MPU6050-Beschleunigungsmesser und Gyroskopmodul sowie einem Servomotor. Dieses Gerät erfasst menschliche Bewegungen – insbesondere die Neigung deiner Hand – und übersetzt sie in die Bewegung des Servomotors. Diese Technologie wird häufig in der Robotik und in Fernsteuerungssystemen wie chirurgischen Robotern oder Roboterarmen eingesetzt.
Benötigte Komponenten
Für dieses Projekt werden folgende Komponenten benötigt.
Ein komplettes Kit ist besonders praktisch. Hier ist der Link:
Name |
ENTHALTENE TEILE |
LINK |
|---|---|---|
Newton Lab Kit |
450+ |
Alternativ können die Komponenten auch einzeln über die folgenden Links erworben werden.
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
||
6 |
1 |
Funktionsweise der Komponenten
MPU6050 Beschleunigungsmesser und Gyroskop: Ein 6-Achsen-Bewegungssensor, der Beschleunigung und Winkelgeschwindigkeit entlang der X-, Y- und Z-Achsen misst. Wir verwenden ihn, um die Neigung deiner Hand zu erkennen.
Servomotor: Ein Motor, der auf einen bestimmten Winkel eingestellt werden kann. Er wird die von der MPU6050 erfassten Bewegungen nachahmen.
Schaltplan
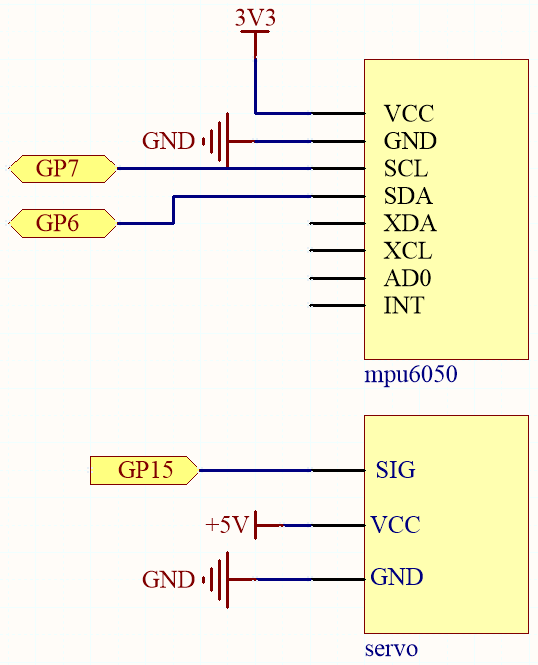
Der MPU6050 berechnet den Lagewinkel basierend auf den Beschleunigungswerten in jeder Richtung.
Das Programm steuert den Servo entsprechend dem veränderten Lagewinkel.
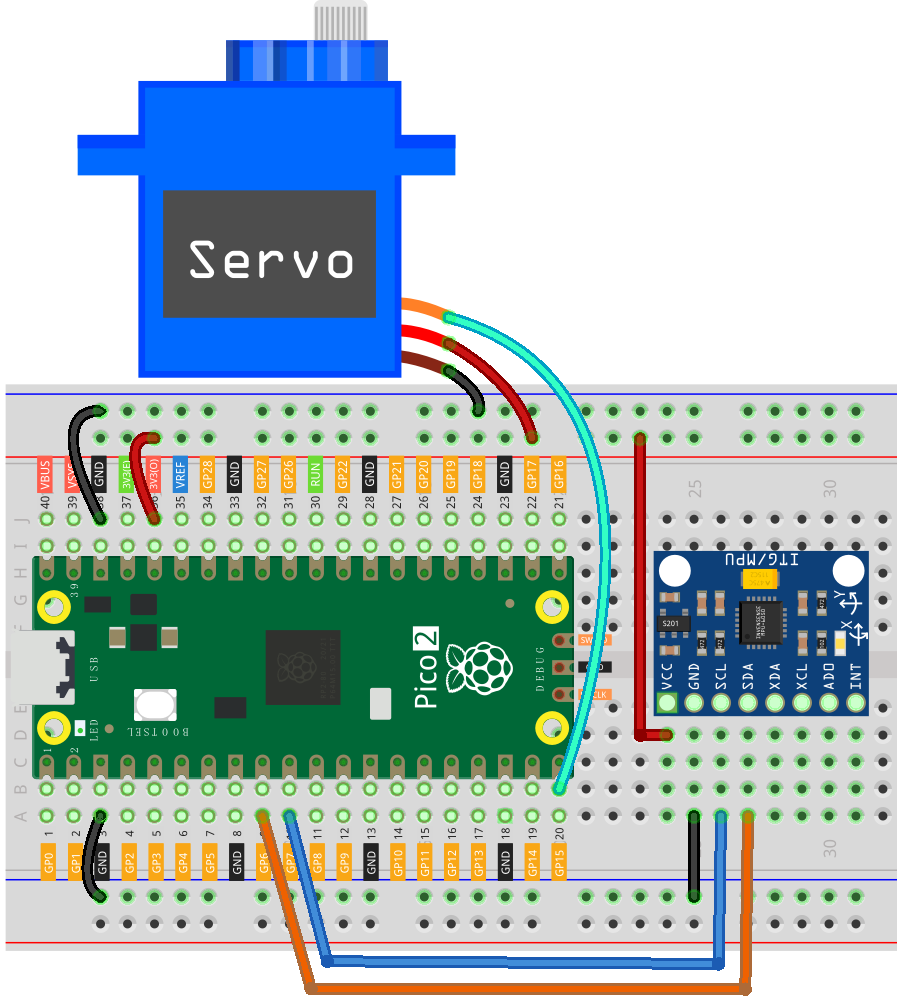
Verdrahtungsdiagramm
Code schreiben
Das folgende MicroPython-Skript:
Liest die Beschleunigungsdaten des MPU6050 aus.
Berechnet den Neigungswinkel deiner Hand.
Steuert den Servomotor entsprechend der erkannten Neigung.
Bemerkung
Öffne
7.11_somatosensory_controller.pyausnewton-lab-kit/micropythonoder kopiere den Code in Thonny, dann klicke auf „Run“ oder drücke F5.Stelle sicher, dass der richtige Interpreter ausgewählt ist: MicroPython (Raspberry Pi Pico).COMxx.
Die Dateien
imu.pyundvector3d.pymüssen hochgeladen sein. Eine Anleitung findest du unter Bibliotheken auf den Pico hochladen.
from imu import MPU6050
from machine import I2C, Pin, PWM
import utime
import math
# Initialisierung der I2C-Kommunikation für MPU6050
i2c = I2C(1, scl=Pin(7), sda=Pin(6))
mpu = MPU6050(i2c)
# Initialisierung des PWM-Signals für den Servomotor an GP15
servo = PWM(Pin(15))
servo.freq(50) # Setzt die Frequenz auf 50 Hz für den Servo
# Funktion zur Umrechnung des Winkels in den PWM-Duty-Cycle
def angle_to_duty(angle):
# Convert angle (0-180) to duty cycle (0.5ms - 2.5ms pulse width)
# Duty cycle range is from 2% to 12% for 0.5ms to 2.5ms at 50Hz
duty_cycle = (angle / 18) + 2
duty_u16 = int(duty_cycle / 100 * 65535)
return duty_u16
# Funktion zur Berechnung des Neigungswinkels anhand der Beschleunigungsdaten
def get_tilt_angle():
accel = mpu.accel
x = accel.x
y = accel.y
z = accel.z
angle = math.atan2(y, z) * (180 / math.pi)
return angle + 90 # Justiert den Winkel auf den Bereich 0 bis 180 Grad
# Hauptschleife
try:
while True:
angle = get_tilt_angle()
if angle < 0:
angle = 0
elif angle > 180:
angle = 180
duty = angle_to_duty(angle)
servo.duty_u16(duty)
utime.sleep(0.1)
except KeyboardInterrupt:
servo.deinit()
print("Program stopped.")
Nach dem Start des Programms kannst du deine Hand kippen. Der Servomotor sollte diese Bewegung entsprechend nachahmen. Beobachte, wie der Servo auf deine Handbewegungen reagiert.
Den Code verstehen
Initialisierung:
I2C-Kommunikation: Wird eingerichtet, um Daten vom MPU6050 zu lesen.
PWM für den Servomotor: Initialisiert an GP15 mit einer Frequenz von 50 Hz.
Winkelberechnung:
get_tilt_angle(): Berechnet den Neigungswinkel basierend auf den Beschleunigungswerten.
def get_tilt_angle(): accel = mpu.accel x = accel.x y = accel.y z = accel.z angle = math.atan2(y, z) * (180 / math.pi) return angle + 90 # Justierung auf den Bereich 0 bis 180 Grad
Servo-Steuerung:
angle_to_duty(angle): Wandelt den Winkel in das entsprechende PWM-Signal um.PWM-Berechnung: Der Servo erwartet Impulse zwischen 0,5 ms (0 Grad) und 2,5 ms (180 Grad) bei 50 Hz.
def angle_to_duty(angle): # Convert angle (0-180) to duty cycle (0.5ms - 2.5ms pulse width) # Duty cycle range is from 2% to 12% for 0.5ms to 2.5ms at 50Hz duty_cycle = (angle / 18) + 2 duty_u16 = int(duty_cycle / 100 * 65535) return duty_u16
Hauptschleife:
Liest den Neigungswinkel aus.
Passt den Winkel an, um sicherzustellen, dass er im Bereich von 0 bis 180 Grad bleibt.
Setzt die Servoposition entsprechend dem berechneten Winkel.
Enthält eine kurze Verzögerung, um Vibrationen zu vermeiden.
Fängt eine Tastaturunterbrechung ab, um den Servo sicher zu deaktivieren.
try: while True: angle = get_tilt_angle() if angle < 0: angle = 0 elif angle > 180: angle = 180 duty = angle_to_duty(angle) servo.duty_u16(duty) utime.sleep(0.1) except KeyboardInterrupt: servo.deinit() print("Program stopped.")
Fehlersuche
Servo bewegt sich nicht:
Überprüfe, ob der Servo korrekt mit Strom versorgt wird.
Stelle sicher, dass das Signalkabel mit GP15 verbunden ist.
Prüfe, ob die Masse zwischen dem Pico und dem Servo richtig verbunden ist.
Ungenaue Bewegungen:
Achte darauf, dass der MPU6050 sicher befestigt ist und nicht übermäßig wackelt.
Falls nötig, passe die Berechnungen für den Neigungswinkel an.
Programmfehler:
Stelle sicher, dass imu.py und vector3d.py korrekt hochgeladen wurden.
Überprüfe den Code auf Tippfehler oder fehlerhafte Einrückungen.
Erweiterungen und Verbesserungen
Steuerung mehrerer Servos:
Ergänze weitere Servos, um zusätzliche Achsen zu steuern.
Erweitere den Code, um Drehungen um mehrere Achsen zu verarbeiten.
Kabellose Kommunikation:
Verwende Bluetooth- oder Wi-Fi-Module, um Sensordaten an ein anderes Gerät zur Steuerung der Servos zu senden.
Daten-Glättung:
Implementiere Filter (z. B. Kalman-Filter), um die Sensordaten zu stabilisieren.
Visuelles Feedback:
Integriere ein OLED- oder LCD-Display, um die Echtzeit-Winkelwerte anzuzeigen.
Fazit
Du hast erfolgreich einen Somatosensorischen Controller entwickelt, der menschliche Bewegungen erfasst und in mechanische Bewegungen umsetzt. Dieses Projekt zeigt, wie Sensoren und Aktoren zusammenarbeiten, um interaktive Systeme zu erstellen – ähnlich denen, die in der Robotik und Fernsteuerung verwendet werden.
Erweitere dieses Projekt gerne durch zusätzliche Funktionen oder integriere es in größere Systeme!