Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
4.1 Small Fan¶
In this engaging project, we’ll explore how to drive a motor using the L293D.
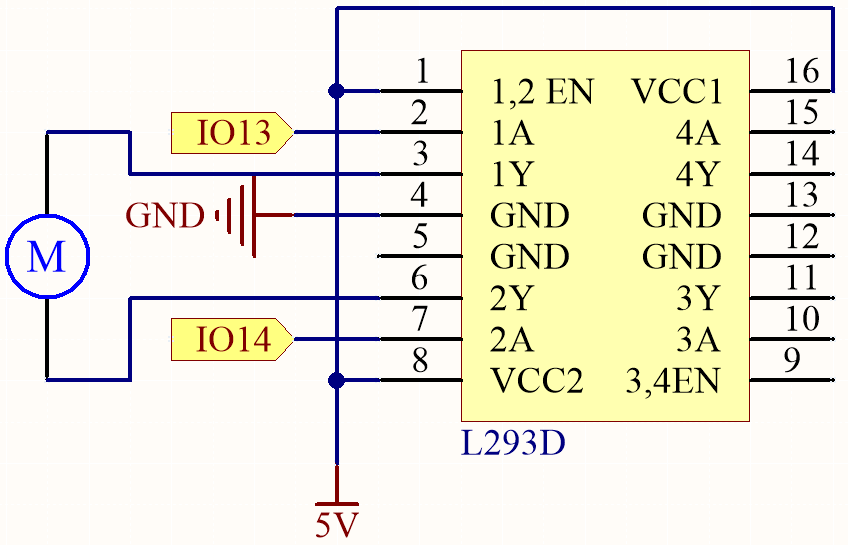
The L293D is a versatile integrated circuit (IC) commonly used for motor control in electronics and robotics projects. It can drive two motors in both forward and reverse directions, making it a popular choice for applications requiring precise motor control.
By the end of this captivating project, you will have gained a thorough understanding of how digital signals and PWM signals can effectively be utilized to control motors. This invaluable knowledge will prove to be a solid foundation for your future endeavors in robotics and mechatronics. Buckle up and get ready to dive into the exciting world of motor control with the L293D!
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
ESP32 Starter Kit |
320+ |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
- |
Available Pins
Here is a list of available pins on the ESP32 board for this project.
Available Pins |
IO13, IO12, IO14, IO27, IO26, IO25, IO33, IO32, IO15, IO2, IO0, IO4, IO5, IO18, IO19, IO21, IO22, IO23 |
Schematic
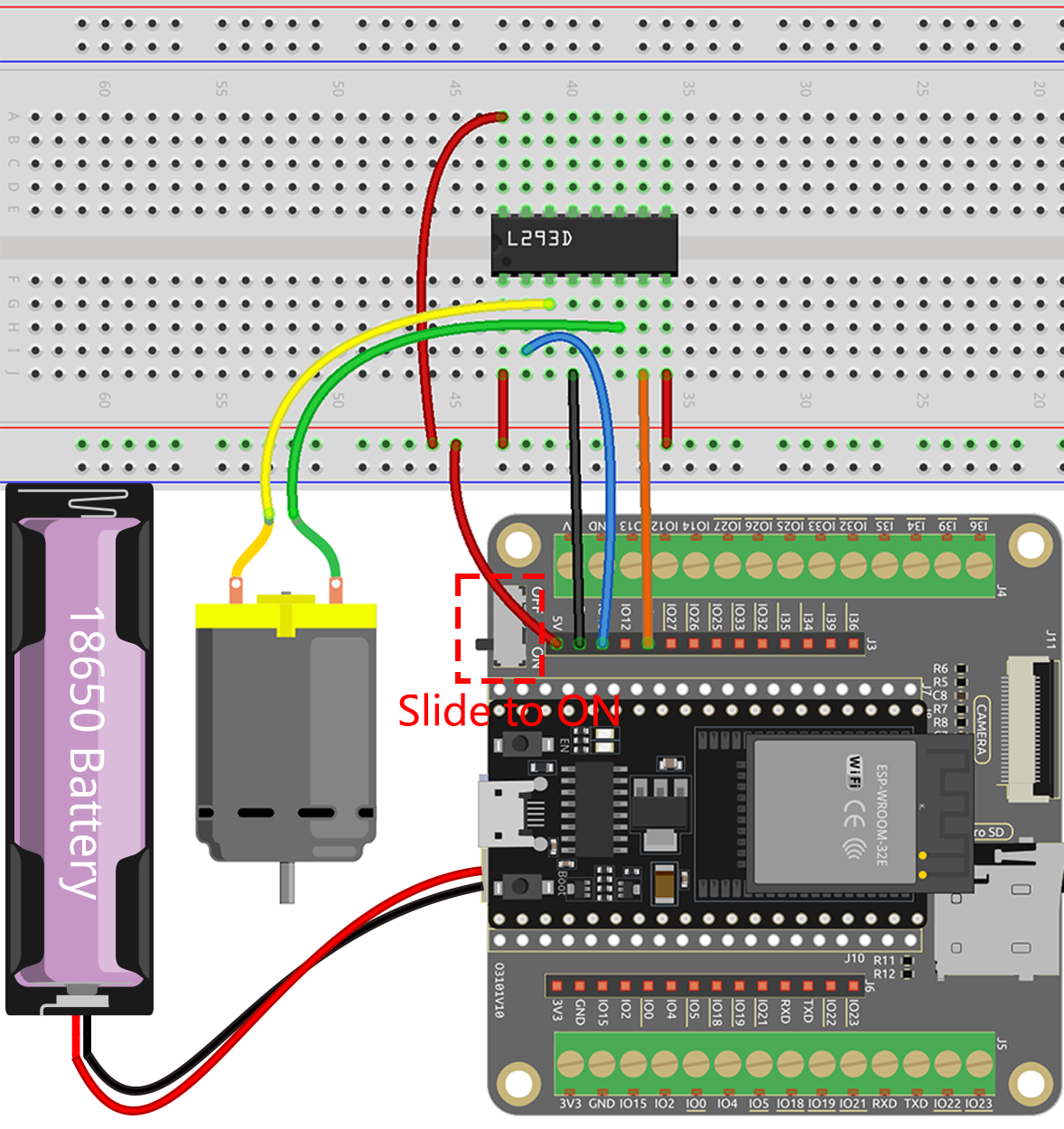
Wiring
Note
Since the motor requires a relatively high current, it is necessary to first insert the Power Pack and then slide the switch on the expansion board to the ON position to activate the power supply.
Code
Note
Open the
4.1_motor_turn.pyfile located in theesp32-starter-kit-main\micropython\codespath, or copy and paste the code into Thonny. Then, click “Run Current Script” or press F5 to execute it.Make sure to select the “MicroPython (ESP32).COMxx” interpreter in the bottom right corner.
import machine
import time
# Create Pin objects representing the motor control pins and set them to output mode
motor1A = machine.Pin(13, machine.Pin.OUT)
motor2A = machine.Pin(14, machine.Pin.OUT)
# Define a function to rotate the motor clockwise
def clockwise():
motor1A.value(1)
motor2A.value(0)
# Define a function to rotate the motor anticlockwise
def anticlockwise():
motor1A.value(0)
motor2A.value(1)
# Define a function to stop the motor
def stop():
motor1A.value(0)
motor2A.value(0)
# Enter an infinite loop
try:
while True:
clockwise() # Rotate the motor clockwise
time.sleep(1) # Pause for 1 second
anticlockwise() # Rotate the motor anticlockwise
time.sleep(1)
stop() # Stop the motor
time.sleep(2)
except KeyboardInterrupt:
stop() # Stop the motor when KeyboardInterrupt is caught
During script execution, you will see the motor alternately rotating clockwise and counterclockwise every second.
Learn More
In addition to simply making the motor rotate clockwise and counterclockwise, you can also control the speed of the motor’s rotation by using pulse-width modulation (PWM) on the control pin, as shown below.
Note
Open the
4.1_motor_turn_pwm.pyfile located in theesp32-starter-kit-main\micropython\codespath, or copy and paste the code into Thonny. Then, click “Run Current Script” or press F5 to execute it.Make sure to select the “MicroPython (ESP32).COMxx” interpreter in the bottom right corner.
from machine import Pin, PWM
import time
# Create PWM objects representing the motor control pins and set their frequency to 1000 Hz
motor1A = PWM(Pin(13, Pin.OUT))
motor2A = PWM(Pin(14, Pin.OUT))
motor1A.freq(500)
motor2A.freq(500)
# Enter an infinite loop
while True:
# Rotate the motor forward by gradually increasing the power on the motor1A pin
for power in range(0, 1023, 20):
motor1A.duty(power)
motor2A.duty(0)
time.sleep(0.1)
# Decreasing the power on the motor1A pin
for power in range(1023, 0, -20):
motor1A.duty(power)
motor2A.duty(0)
time.sleep(0.1)
# Rotate the motor in the opposite direction by gradually increasing the power on the motor2A pin
for power in range(0, 1023, 20):
motor1A.duty(0)
motor2A.duty(power)
time.sleep(0.1)
# Decreasing the power on the motor2A pin
for power in range(1023, 0, -20):
motor1A.duty(0)
motor2A.duty(power)
time.sleep(0.1)
Unlike the previous script, here the motor is controlled by PWM signals with a frequency of 1000 Hz, which determines the speed of the motor.
The code uses a
while Trueloop to run continuously. Inside the loop, there are fourforloops that control the motors in a sequence.The first two
forloops increase and decrease the speed of IN1 while keeping IN2 at 0 speed.The next two
forloops increase and decrease the speed of IN2 while keeping IN1 at 0 speed.The
rangefunction in eachforloop produces a string of numbers that serves as the duty cycle of the PWM signal. This is then output to IN1 or IN2 via thedutymethod. The duty cycle determines the percentage of time that the PWM signal is high, which in turn determines the average voltage applied to the motor, and thus the motor speed.The
time.sleepfunction is used to introduce a delay of 0.1 seconds between each step in the sequence, which allows the motor to change speed gradually, rather than jumping from one speed to another instantaneously.